第二十八章 三轴加速度实验
前面,我们介绍了IIC驱动XL9555、AP3216C、AT24C02等器件,本章我们将向大家介绍如何使用IIC来驱动QMA6100P三轴加速度计。在本章中,作者将使用MicroPython C模块程序来驱动QMA6100P,从而获取X,Y,Z的原始数据,并把原始数据转化为pitch俯仰角和roll翻滚角。
本章分为如下几个小节:
28.1 QMA6100P简介
28.2 QMA6100P C模块解析
28.3 硬件设计
28.4 程序设计
28.5 下载验证
28.1 QMA6100P简介
QMA6100P是一款三轴加速度传感器,具有高集成、小尺寸封装的特点。它集成了信号调节ASIC的加速度传感器,可以感知倾斜、运动、冲击和振动。QMA6100P基于先进的高分辨率单晶硅MEMS技术,配合定制设计的14位ADC专用集成电路,具有低噪声、高精度、低功耗、偏置微调等优点。它支持数字接口I2C和SPI,内置硬件计步器,支持多种不同中断模式。QMA6100P的最大可支持64级FIFO,待机电流为5μA,计步器工作电流为44μA。主要应用市场与优势是手机,手环,手表,各类低功耗IOT设备,集成各类应用算法,计步器,抬手亮屏,垂手亮屏,久坐提醒,跌倒报警,跌落报警,睡眠检测,平衡检测,倾斜检测,睡眠唤醒等超过20种不同应用。QMA6100P还具有低成本和与市场主流传感器兼容的优点,以及超低功耗、可靠性高的特点。下图是QMA6100P内部框图。

图28.1.1 QMA6100P框图
根据上文,QMA6100P三轴加速度计支持SPI和IIC两种通信接口。接口的实现流程可参考《13-52-20 QMA6100P Datasheet Rev. D.pdf》数据手册。本章节以ESP32-S3开发板电路为基准,该开发板使用IIC通信接口来获取QMA6100P三轴加速度计的相关参数。
1,引脚描述
QMA6100P的引脚说明如下表所示。
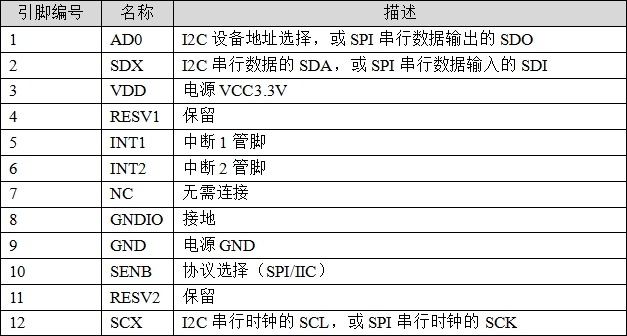
图28.1.1 QMA6100P管脚描述
2,设备地址
从规格书的章节5.4所示,QMA6100P在IIC通信下,具有两种设备地址设置,它们分别为0x12和0x13(7位串行地址)。这两个设备地址的选择是根据QMA6100P的第1号管脚确定,如下图所示。

图28.1.2 设备地址的选择
从上图可知,当第1号管脚(AD0)拉低时,QMA6100P设备地址被设置为0x12,反次,该设备地址为0x13。本开发板是把AD0管脚拉低,所以在QMA6100P设备地址为0x12。
3,写寄存器
QMA6100P的写寄存器时序如下图所示。

图28.1.3 QMA6100P写寄存器时序
图中,先发送QMA6100P的地址(7位,0X12,左移一位后为:0X24),最低位W=0表示写数据,随后发送8位寄存器地址,最后发送8位寄存器值。其中:START,表示IIC起始信号;R/W,表示读/写标志位(R/W =0表示写,R/W =1表示读);SACK,表示应答信号;STOP,表示IIC停止信号。
4,读寄存器
QMA6100P的读寄存器时序如下图所示。
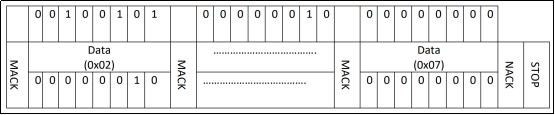
图28.1.4 QMA6100P读寄存器时序
图中,同样是先发送7位地址+写操作,然后再发送寄存器地址,随后,重新发送起始信号(Sr),再次发送7位地址+读操作,然后读取寄存器值。其中:SA,表示重新发送IIC起始信号;MACK,表示MCU应答;NACK,表示设备应答;其他简写同上。
5,寄存器描述
QMA6100P有一些列寄存器,由这些寄存器来控制QMA6100P的工作模式,以及中断配置和数据输出等。这里我们仅介绍我们在本章需要用到的一些寄存器,其他寄存器的描述和说明,请大家参考QMA6100P的数据手册。
本章需要用到QMA6100P的寄存器如下表所示。

表28.1.1 QMA6100P相关寄存器及其说明
其余的寄存器可在数据手册下找到相关描述和配置信息。
28.2 QMA6100P C模块解析
28.2.1 C模块解析
在先前的章节里,作者已经详述了C模块的添加流程以及整体架构,接下来作者将简要介绍正点原子QMA6100P C模块驱动。这个讲解内容会分为几个部分:QMA6100P构造函数、IIC写入数据、IIC读取数据,以及如何获取三轴的数据并转化为pitch俯仰角和roll翻滚角。QMA6100P C模块驱动可在A盘→6,软件资料→1,软件→2,MicroPython开发工具→01-Windows→2,正点原子MicroPython驱动àCModules_LibàIIC路径下找到。
1,QMA6100P构造函数
/* qma6100p结构体 */
typedef struct _qma6100p_obj_t
{
mp_obj_base_t base; /* 基地址 */
mp_obj_base_t *iic_obj; /* 指向IIC控制块 */
} qma6100p_obj_t;
mp_obj_t qma6100p_make_new(const mp_obj_type_t *type,size_t n_args,
size_t n_kw,const mp_obj_t *all_args )
{
/* 创建对象的参数 */
enum
{
ARG_iic,
};
/* 创建对象参数的默认值 */
static const mp_arg_t allowed_args[] = {
{ MP_QSTR_iic, MP_ARG_OBJ | MP_ARG_REQUIRED, {.u_obj = MP_OBJ_NULL} },
};
mp_arg_val_t args[MP_ARRAY_SIZE(allowed_args)];
mp_arg_parse_all_kw_array(n_args, n_kw, all_args,
MP_ARRAY_SIZE(allowed_args), allowed_args, args);
/*创建qma6100p对象*/
qma6100p_self = m_new_obj(qma6100p_obj_t);
qma6100p_self->base.type = &qma6100p_type;
/* 设置对象参数 */
mp_obj_base_t *qma6100p_obj =
(mp_obj_base_t*)MP_OBJ_TO_PTR(args[ARG_iic].u_obj);
qma6100p_self->iic_obj = qma6100p_obj;
/* 初始化qma6100p */
qma6100p_init();
return MP_OBJ_FROM_PTR(qma6100p_self);
}
从上述源代码中可以得知,该构造函数只有一个参数,即传入IIC驱动的控制块。我们可以通过这个控制块调用IIC驱动下的收发函数。然后,作者创建了一个QMA6100P对象,用于实例化对象并引用类的方法。最后,调用了qma6100p_init函数来初始化QMA6100P三轴传感器。以下是该初始化代码的示例:
/**
* @brief 初始化qma6100p
* @param 无
* @retval 0, 成功;
1, 失败;
*/
uint8_t qma6100p_comfig(void)
{
static uint8_t id_data[2];
/* 读取设备ID,正常是0x90 */
qma6100p_register_read(QMA6100P_REG_CHIP_ID,id_data,1);
/* qma6100p的初始化序列,请看手册“6.3 Initial sequence”章节 */
qma6100p_register_write_byte(QMA6100P_REG_RESET,QMA6100P_RESET);
mp_hal_delay_ms(5);
qma6100p_register_write_byte(QMA6100P_REG_RESET,QMA6100P_RESET_END);
mp_hal_delay_ms(10);
qma6100p_register_write_byte(0x11, 0x80);
qma6100p_register_write_byte(0x11, 0x84);
qma6100p_register_write_byte(0x4a, 0x20);
qma6100p_register_write_byte(0x56, 0x01);
qma6100p_register_write_byte(0x5f, 0x80);
mp_hal_delay_ms(1);
qma6100p_register_write_byte(0x5f, 0x00);
mp_hal_delay_ms(10);
/*设置满量程刻度*/
qma6100p_register_write_byte(QMA6100P_REG_RANGE,QMA6100P_RANGE_8G);
/*带宽设置*/
qma6100p_register_write_byte(QMA6100P_REG_BW_ODR,QMA6100P_BW_100);
/*设置时钟和模式*/
qma6100p_register_write_byte(QMA6100P_REG_POWER_MANAGE,
QMA6100P_MCLK_51_2K|0x80);
/*中断配置 */
qma6100p_register_write_byte(0x21, 0x03);
if (id_data[0] == 0x90)
{
ESP_LOGI("qma6100p", "qma6100p success!!!");
return 0; /* qma6100p正常 */
}
else
{
ESP_LOGE("qma6100p", "qma6100p fail!!!");
return 1; /* qma6100p失败 */
}
}
/**
* @brief qma6100p初始化
* @param 无
* @retval 无
*/
void qma6100p_init(void)
{
while (qma6100p_comfig()) /* 检测不到qma6100p */
{
ESP_LOGE("qma6100p", "qma6100p init fail!!!");
mp_hal_delay_ms(500);
}
}
我们可以看到,init函数中调用了qma6100p_config函数,用于初始化和配置QMA6100P传感器模块。在qma6100p_config函数中,我们首先读取0x00寄存器来获取设备ID。然后,我们复位该设备并执行初始化序列(请参考规格书的6.3小节)。接下来,我们配置量程刻度、带宽、中断等参数。最后,我们检查读取的ID是否为0x90。如果是,则设备通信成功;否则,通信失败。
2,写入函数
根据上一节中作者对QMA6100P的IIC写时序流程的讲解,下面我们根据这个流程来编写QMA6100P的IIC写时序代码,如下所示:
/**
* @brief 向qma6100p寄存器写数据
* @param reg :要写入的寄存器地址
* @param data :要写入的数据
* @retval 错误值 :ESP_OK:成功;其他值:错误
*/
static esp_err_t qma6100p_register_write_byte(uint8_t reg, uint8_t data)
{
uint8_t memaddr_buf[1];
memaddr_buf[0] = reg;
mp_obj_base_t *self=(mp_obj_base_t *)MP_OBJ_TO_PTR(qma6100p_self->iic_obj);
mp_machine_i2c_p_t *i2c_p=
(mp_machine_i2c_p_t *)MP_OBJ_TYPE_GET_SLOT(self->type, protocol);
mp_machine_i2c_buf_t bufs[2] = {
{.len = 1, .buf = memaddr_buf},
{.len = 1, .buf = &data},
};
i2c_p->transfer(self, QMA6100P_ADDR, 2, bufs,MP_MACHINE_I2C_FLAG_STOP);
return ESP_OK;
}
在上述源代码中,作者根据传入的IIC控制块,调用了IIC收发函数来发送QMA6100P的命令和数据。发送完成后,函数返回了ESP_OK状态。
3,读取函数
根据上一节中作者对QMA6100P的IIC读时序流程的讲解,下面我们根据这个流程来编写QMA6100P的IIC读时序代码,如下所示:
/**
* @brief 读取qma6100p寄存器的数据
* @param reg_addr :要读取的寄存器地址
* @param data :读取的数据
* @param len :数据大小
* @retval 错误值 :ESP_OK:成功;其他值:错误
*/
esp_err_t qma6100p_register_read(const uint8_t reg, uint8_t *data,
const size_t len)
{
uint8_t memaddr_buf[1];
memaddr_buf[0] = reg;
mp_obj_base_t *self=(mp_obj_base_t *)MP_OBJ_TO_PTR(qma6100p_self->iic_obj);
mp_machine_i2c_p_t *i2c_p =
(mp_machine_i2c_p_t *)MP_OBJ_TYPE_GET_SLOT(self->type, protocol);
mp_machine_i2c_buf_t bufs[2] = {
{.len = 1, .buf = memaddr_buf},
{.len = len, .buf = data},
};
i2c_p->transfer(self, QMA6100P_ADDR, 2, bufs,MP_MACHINE_I2C_FLAG_WRITE1
| MP_MACHINE_I2C_FLAG_READ | MP_MACHINE_I2C_FLAG_STOP);
return ESP_OK;
}
同样地,QMA6100P的读时序也是利用IIC收发函数来实现的。写时序和读时序的唯一区别在于最后的flag标志位不同,从而导致发送流程有所不同。如果读者想了解i2c_p->transfer函数的收发流程,可以在MicroPython源代码中找到machine_i2c.c文件(位于micropython\ports\esp32路径下)。
4,读取三轴xyz原始数据和pitch俯仰角和roll翻滚角数据函数
下面是根据XYZ原始数据,使用特定的算法来pitch俯仰角和roll翻滚角,如下所示:
/**
* @brief 读取三轴数据(原始数据、加速度、俯仰角和翻滚角)
* @param rawdata:qma6100p数据结构体
* @retval 无
*/
void qma6100p_read_rawdata(qma6100p_rawdata_t *rawdata)
{
/* 读取三轴原始数据 */
qma6100p_register_read(QMA6100P_REG_XOUTL, xyz_data, 6);
raw_data[0] = (short)(((xyz_data[1] << 8)) | (xyz_data[0]));
raw_data[1] = (short)(((xyz_data[3] << 8)) | (xyz_data[2]));
raw_data[2] = (short)(((xyz_data[5] << 8)) | (xyz_data[4]));
rawdata->acc_x = (float)((raw_data[0] >> 2) * M_G) / (1024);
rawdata->acc_y = (float)((raw_data[1] >> 2) * M_G) / (1024);
rawdata->acc_z = (float)((raw_data[2] >> 2) * M_G) / (1024);
/* 计算pitch俯仰角和roll翻滚角 */
rawdata->acc_g = sqrt(rawdata->acc_x*rawdata->acc_x +
rawdata->acc_y * rawdata->acc_y + rawdata->acc_z*rawdata->acc_z);
acc_normal = sqrtf(rawdata->acc_x * rawdata->acc_x + rawdata->acc_y
* rawdata->acc_y + rawdata->acc_z * rawdata->acc_z);
accl_data[0] = rawdata->acc_x / acc_normal;
accl_data[1] = rawdata->acc_y / acc_normal;
accl_data[2] = rawdata->acc_z / acc_normal;
rawdata->pitch = -atan2f(rawdata->acc_x,rawdata->acc_z) * RAD_TO_DEG;
acc_normal = sqrtf(accl_data[0] * accl_data[0] + accl_data[1]
* accl_data[1] + accl_data[2] * accl_data[2]);
rawdata->roll = asinf((accl_data[1]/acc_normal)) * RAD_TO_DEG ;
}
上述源码中,作者先读取三轴的XYZ原始数据,然后经过特定的算法计算出pitch俯仰角和roll翻滚角。
28.2.2 C模块构造与类的方法
1,atk_qma6100p类的构造方法
qma6100p的构造对象方法如下:
class atk_qma6100p.init(iic) 使用示例:qma6100p = atk_qma6100p.init(iic)
该构造函数的参数描述,如下表所示。

表28.2.1 atk_qma6100p.init构造方法参数描述
返回值:qma6100p对象。
2,qma6100p类的方法
①:读取测量数据。
其函数原型如下:
qma6100p.qma6100p_read()
返回值:无。
②:读取X轴原始数据。
其函数原型如下:
qma6100p.qma6100p_acc_x()
返回值:X轴原始数据。
③:读取Y轴原始数据。
其函数原型如下:
qma6100p.qma6100p_acc_y()
返回值:Y轴原始数据。
④:读取Z轴原始数据。
其函数原型如下:
qma6100p.qma6100p_acc_z()
返回值:Z轴原始数据。
⑤:读取pitch俯仰角数据。
其函数原型如下:
qma6100p.qma6100p_acc_pitch()
返回值:pitch俯仰角数据。
⑥:读取roll翻滚角数据。
其函数原型如下:
qma6100p.qma6100p_acc_roll()
返回值:roll翻滚角数据。
28.3 硬件设计
1. 例程功能
本章实验功能简介:在SPILCD显示屏上,我们能够看到XYZ的数据。当我们翻转开发板时,这些数据会根据开发板的翻转角度来计算出pitch俯仰角和roll翻滚角。
2. 硬件资源
1)XL9555
IIC_INT-IO0(需在P5连接IO0)
IIC_SDA-IO41
IIC_SCL-IO42
2)SPILCD
CS-IO21
SCK-IO12
SDA-IO11
DC-IO40(在P5端口,使用跳线帽将IO_SET和LCD_DC相连)
PWR- IO1_3(XL9555)
RST- IO1_2(XL9555)
3)QMA6100P
IIC_SDA-IO41
IIC_SCL-IO42
QMA_INT-IO0_1(XL9555)
3. 原理图
QMA6100P接口与ESP32-S3的连接关系,如下图所示:
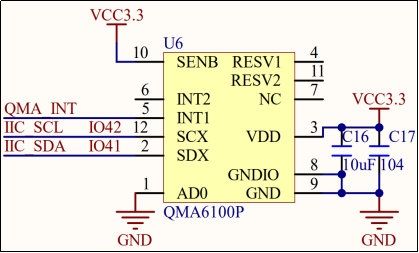
图27.2.1 QMA6100P接口与ESP32-S3的连接电路图
28.4 程序设计
28.3.1 程序流程图
程序流程图能帮助我们更好的理解一个工程的功能和实现的过程,对学习和设计工程有很好的主导作用。下面看看本实验的程序流程图。
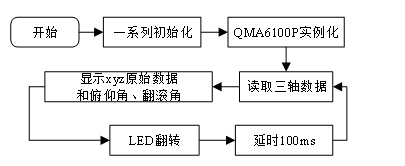
图28.3.1.1 程序流程图
28.3.2 程序解析
本书籍的代码都在main.py脚本下编写的,读者可在光盘资料下找到对应的源码。QMA6100P实验main.py源码如下:
from machine import Pin,SPI,I2C import atk_xl9555 as io_ex import atk_lcd as lcd import atk_qma6100p as qma6100p import time """ * @brief 程序入口 * @param 无 * @retval 无 """ if __name__ == '__main__': # 初始化LED并输出高电平 led = Pin(1,Pin.OUT,value = 1) # IIC初始化 i2c0 = I2C(0, scl = Pin(42), sda = Pin(41), freq = 400000) # XL9555初始化 xl9555 = io_ex.init(i2c0) # 复位LCD xl9555.write_bit(io_ex.SLCD_RST,0) time.sleep_ms(100) xl9555.write_bit(io_ex.SLCD_RST,1) time.sleep_ms(100) # 初始化SPI spi = SPI(2,baudrate = 80000000, sck = Pin(12), mosi=Pin(11), miso=Pin(13)) # 初始化LCD,lcd = 0为正点原子2.4寸屏幕;lcd = 1为正点原子1.3寸SPILCD屏幕; display = lcd.init(spi,dc = Pin(40,Pin.OUT,Pin.PULL_UP,value = 1), cs = Pin(21,Pin.OUT,Pin.PULL_UP,value = 1),dir = 1,lcd = 0) # 开启LCD背光 xl9555.write_bit(io_ex.SLCD_PWR,1) time.sleep_ms(100) # 初始化qma6100p qma6100 = qma6100p.init(i2c0) # 显示实验信息 display.string(30, 50, 200, 16, 16, "ESP32-S3",lcd.RED) display.string(30, 70, 200, 16, 16, "QMA6100P TEST", lcd.RED) display.string(30, 90, 200, 16, 16, "ATOM@ALIENTEK", lcd.RED) display.string(30, 110, 200, 16, 16, "acc_x:", lcd.RED) display.string(30, 130, 200, 16, 16, "acc_y:", lcd.RED) display.string(30, 150, 200, 16, 16, "acc_z:", lcd.RED) display.string(30, 170, 200, 16, 16, "acc_g:", lcd.RED) display.string(30, 190, 200, 16, 16, "pitch:", lcd.RED) display.string(30, 210, 200, 16, 16, "roll:", lcd.RED) while True : qma6100.qma6100p_read() display.string(110,110,200,16,16,str(qma6100.qma6100p_acc_x()),lcd.BLUE) display.string(110,130,200,16,16,str(qma6100.qma6100p_acc_y()),lcd.BLUE) display.string(110,150,200,16,16,str(qma6100.qma6100p_acc_z()),lcd.BLUE) display.string(110,170,200,16,16,str(qma6100.qma6100p_acc_g()),lcd.BLUE) display.string(110,190,200,16,16, str(qma6100.qma6100p_acc_pitch()),lcd.BLUE) display.string(110,210,200,16,16, str(qma6100.qma6100p_acc_roll()),lcd.BLUE) led_state = led.value() led.value(not led_state) time.sleep_ms(100) # 延时100ms
从上述源码可知,我们首先初始化各个外设,如IIC、SPI、XL9555、QMA6100P和LCD等驱动,然后调用qma6100.qma6100p_read函数测量数据,最后调用qma6100p_acc_x等函数获取XYZG、pitch俯仰角和roll翻滚角数据,并在SPILCD上显示。
28.5 下载验证
程序下载到开发板后,LCD不断刷新三轴的原始数据、pitch俯仰角和roll翻滚角。当用户转动或翻转开发板时,pitch俯仰角和roll翻滚角会随之变化,如下图所示。
图28.5.1 LCD显示效果图