第二十七章 SPI实验
本章,我们将介绍如何使用STM32G474的SPI功能,并实现对外部FLASH的读写并把结果显示在TFTLCD模块上。本章分为如下几个小节:
27.1 SPI及NOR Flash芯片介绍
27.2 硬件设计
27.3 程序设计
27.4 下载验证
27.1 SPI及NOR Flash介绍
27.1.1 SPI介绍
我们将从结构、时序和寄存器三个部分来介绍SPI。
27.1.1.1 SPI框图
SPI是英语 Serial Peripheral interface 缩写,顾名思义就是串行外围设备接口。SPI通信协议是 Motorola公司首先在其 MC68HCXX 系列处理器上定义的。SPI 接口是一种高速的全双工同步的通信总线,已经广泛应用在众多MCU、存储芯片、AD转换器和LCD之间。大部分STM32是有3个SPI接口,本实验使用的是SPI1。
我们先看SPI的结构框图,了解它的大致功能,如图27.1.1.1.1所示:
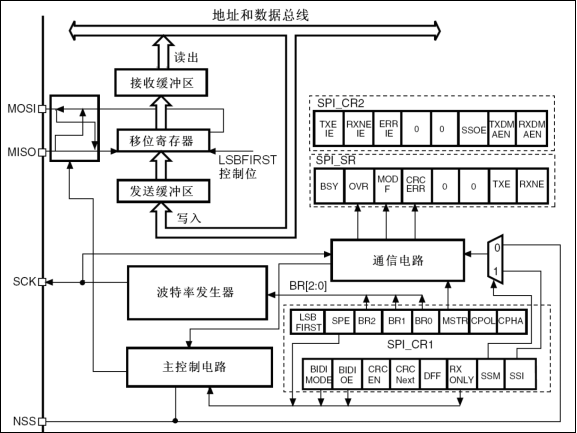
图27.1.1.1.1 SPI框图
围绕框图,我们展开介绍一下SPI的引脚信息、工作原理以及传输方式,把SPI的4种工作方式放在后面讲解。
SPI的引脚信息:
MISO(Master In / Slave Out)主设备数据输入,从设备数据输出。
MOSI(Master Out / Slave In)主设备数据输出,从设备数据输入。
SCLK(Serial Clock)时钟信号,由主设备产生。
CS(Chip Select)从设备片选信号,由主设备产生。
SPI的工作原理:在主机和从机都有一个串行移位寄存器,主机通过向它的SPI串行寄存器写入一个字节来发起一次传输。串行移位寄存器通过MOSI信号线将字节传送给从机,从机也将自己的串行移位寄存器中的内容通过MISO信号线返回给主机。这样,两个移位寄存器中的内容就被交换。外设的写操作和读操作是同步完成的。如果只是进行写操作,主机只需忽略接收到的字节。反之,若主机要读取从机的一个字节,就必须发送一个空字节引发从机传输。
SPI的传输方式:SPI总线具有三种传输方式:全双工、单工以及半双工传输方式。
全双工通信:在任何时刻,主机与从机之间都可以同时进行数据的发送和接收。
单工通信:在同一时刻,只有一个传输的方向,发送或者是接收。
半双工通信:在同一时刻,只能为一个方向传输数据。
27.1.1.2 SPI工作模式
STM32要与具有SPI接口的器件进行通信,就必须遵循SPI的通信协议。每一种通信协议都有各自的读写数据时序,当然SPI也不例外。SPI通信协议就具备4种工作模式,在讲这4种工作模式前,首先先知道两个单词CPOL和CPHA。
CPOL,详称Clock Polarity,就是时钟极性,当主从机没有数据传输的时候(空闲状态)SCL线的电平状态。假如空闲状态是高电平,CPOL=1;若空闲状态时低电平,那么CPOL = 0。
CPHA,详称Clock Phase,就是时钟相位。在这里先科普一下数据传输的常识:同步通信时,数据的变化和采样都是在时钟边沿上进行的,每一个时钟周期都会有上升沿和下降沿两个边沿,那么数据的变化和采样就分别安排在两个不同的边沿,由于数据在产生和到它稳定是需要一定的时间,那么假如我们在第1个边沿信号把数据输出了,从机只能从第2个边沿信号去采样这个数据。
CPHA实质指的是数据的采样时刻,CPHA = 0的情况就表示数据的采样是从第1个边沿信号上即奇数边沿,具体是上升沿还是下降沿的问题,是由CPOL决定的。这里就存在一个问题:当开始传输第一个bit的时候,第1个时钟边沿就采集该数据了,那数据是什么时候输出来的呢?那么就有两种情况:一是CS使能的边沿,二是上一帧数据的最后一个时钟沿。
CPHA = 1的情况就是表示数据采样是从第2个边沿即偶数边沿,它的边沿极性要注意一点,不是和上面CPHA=0一样的边沿情况。前面的是奇数边沿采样数据,从SCL空闲状态的直接跳变,空闲状态是高电平,那么它就是下降沿,反之就是上升沿。由于CPHA=1是偶数边沿采样,所以需要根据偶数边沿判断,假如第一个边沿即奇数边沿是下降沿,那么偶数边沿的边沿极性就是上升沿。不理解的,可以看一下下面4种SPI工作模式。
由于CPOL和CPHA都有两种不同状态,所以SPI分成了4种模式。我们在开发的时候,使用比较多的是模式0和模式3。下面请看表27.1.1.2.1 SPI工作模式表:
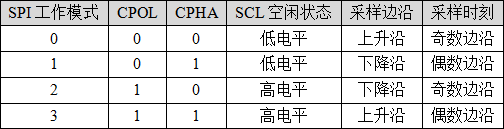
表27.1.1.2.1 SPI工作模式表
下面分别对SPI的4种工作模式进行分析:
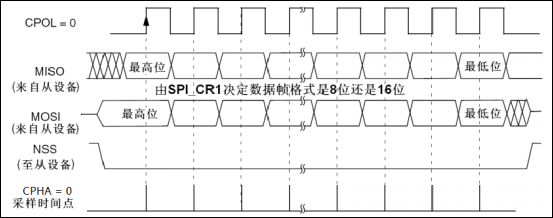
图27.1.1.2.1 串行时钟的奇数边沿上升沿采样时序图
我们分析一下CPOL=0&&CPHA=0的时序,图27.1.1.2.1就是串行时钟的奇数边沿上升沿采样的情况,首先由于配置了CPOL=0,可以看到当数据未发送或者发送完毕,SCL的状态是低电平,再者CPHA=0即是奇数边沿采集。所以传输的数据会在奇数边沿上升沿被采集,MOSI和MISO数据的有效信号需要在SCK奇数边沿保持稳定且被采样,在非采样时刻,MOSI和MISO的有效信号才发生变化。
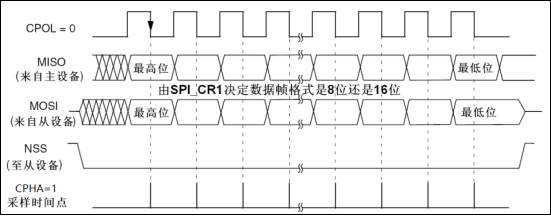
图27.1.1.2.2 串行时钟的偶数边沿下降沿采样图
现在分析一下CPOL=0&CPHA=1的时序,图36.1.1.2.2是串行时钟的偶数边沿下降沿采样的情况。由于CPOL=0,所以SCL的空闲状态依然是低电平,CPHA=1数据就从偶数边沿采样,至于是上升沿还是下降沿,从上图就可以知道,是下降沿。这里有一个误区,空闲状态是低电平的情况下,不是应该上升沿吗,为什么这里是下降沿?首先我们先明确这里是偶数边沿采样,那么看图就很清晰,SCL低电平空闲状态下,上升沿是在奇数边沿上,下降沿是在偶数边沿上。
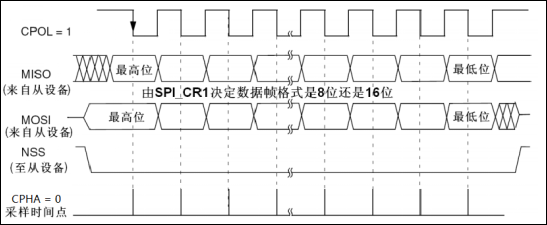
图27.1.1.2.3 串行时钟的奇数边沿下降沿采样图
图27.1.1.2.3这种情况和第一种情况相似,只是这里是CPOL=1,即SCL空闲状态为高电平,在CPHA=0,奇数边沿采样的情况下,数据在奇数边沿下降沿要保持稳定并等待采样。

图27.1.1.2.4 串行时钟的偶数边沿上升沿采样图
图27.1.1.2.4是CPOL=1&&CPHA=1的情形,可以看到未发送数据和发送数据完毕,SCL的状态是高电平,奇数边沿的边沿极性是上升沿,偶数边沿的边沿极性是下降沿。因为CPHA=1,所以数据在偶数边沿上升沿被采样。在奇数边沿的时候MOSI和MISO会发生变化,在偶数边沿时候是稳定的。
27.1.1.3 SPI寄存器
在这里我们简单介绍一下本实验用到的寄存器。
l SPI控制寄存器1(SPI_CR1)
SPI 控制寄存器1描述如图27.1.1.3.1所示:

图27.1.1.3.1 SPI_CR1寄存器
该寄存器控制着SPI很多相关信息,包括主设备模式选择,传输方向,数据格式,时钟极性、时钟相位和使能等。下面讲解一下本实验配置的位,在位CPHA置1,数据采样从第二个时钟边沿开始;在位CPOL置0,在空闲状态时,SCK保持低电平;在位MSTR置1,配置为主设备;在位BR[2:0]置7,使用256分频,速度最低;在位SPE置1,开启SPI设备;在位LSBFIRST置0,MSB先传输;在位SSI置1,禁止软件从设备,即做主机;在位SSM置1,软件片选NSS控制;在位RXONLY置0,传输方式采用的是全双工模式;在位DFF置0,使用8位数据帧格式。
l SPI状态寄存器(SPI_SR)
SPI 状态寄存器描述如图27.1.1.3.2所示:
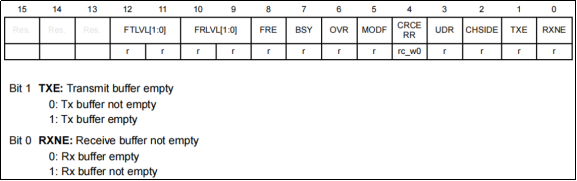
图27.1.1.3.2 SPI_SR寄存器(部分)
该寄存器是查询当前SPI的状态,我们在实验中用到的是TXE位和RXNE位,即发送完成和接收完成是否的标记。
l SPI数据寄存器(SPI_DR)
SPI 数据寄存器描述如图27.1.1.3.3所示:
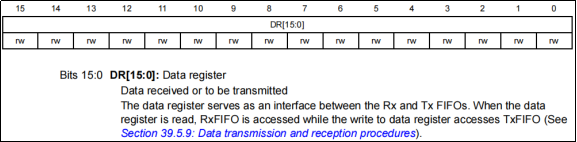
图27.1.1.3.3 SPI_DR寄存器
该寄存器是SPI数据寄存器,是一个双寄存器,包括了发送缓存和接收缓存。当向该寄存器写数据的时候,SPI就会自动发送,当收到数据的时候,也是存在该寄存器内。
27.1.2 NOR Flash简介
27.1.2.1 Flash简介
Flash是常见的用于存储数据的半导体器件,它具有容量大、可重复擦写、按“扇区/块”擦除、掉电后数据可继续保存的特性。常见的Flash主要有NOR Flash和Nand Flash两种类型,它们的特性如表27.1.2.1.1所示。NOR和NAND是两种数字门电路,可以简单地认为Flash内部存储单元使用哪种门作存储单元就是哪类型的Flash。U盘,SSD,eMMC等为NAND型,而NOR Flash则根据设计需要灵活应用于各类PCB上,如BIOS,手机等。
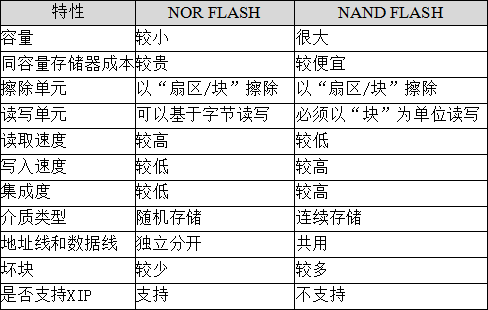
表27.1.2.1.1 NOR Flash和NAND Flash特性对比
NOR与NAND在数据写入前都需要有擦除操作,但实际上NOR Flash的一个bit可以从1变成0,而要从0变1就要擦除后再写入,NAND Flash这两种情况都需要擦除。擦除操作的最小单位为“扇区/块”,这意味着有时候即使只写一字节的数据,则这个“扇区/块”上之前的数据都可能会被擦除。
NOR的地址线和数据线分开,它可以按“字节”读写数据,符合CPU的指令译码执行要求,所以假如NOR上存储了代码指令,CPU给NOR一个地址,NOR就能向CPU返回一个数据让CPU执行,中间不需要额外的处理操作,这体现于表27.1.2.1.1中的支持XIP特性(eXecute In Place)。因此可以用NOR Flash直接作为嵌入式MCU的程序存储空间。
NAND的数据和地址线共用,只能按“块”来读写数据,假如NAND上存储了代码指令,CPU给NAND地址后,它无法直接返回该地址的数据,所以不符合指令译码要求。
若代码存储在NAND上,可以把它先加载到RAM存储器上,再由CPU执行。所以在功能上可以认为NOR是一种断电后数据不丢失的RAM,但它的擦除单位与RAM有区别,且读写速度比RAM要慢得多。
Flash也有对应的缺点,我们在使用过程中需要尽量去规避这些问题:一是Flash的使用寿命,另一个是可能的位反转。
使用寿命体现在:读写上是FLASH的擦除次数都是有限的(NOR Flash普遍是10万次左右),当它的使用接近寿命的时候,可能会出现写操作失败。由于NAND通常是整块擦写,块内有一位失效整个块就会失效,这被称为坏块。使用NAND Flash最好通过算法扫描介质找出坏块并标记为不可用,因为坏块上的数据是不准确的。
位反转是数据位写入时为1,但经过一定时间的环境变化后可能实际变为0的情况,反之亦然。位反转的原因很多,可能是器件特性也可能与环境、干扰有关,由于位反转的问题可能存在,所以FLASH存储器需要“探测/错误更正(EDC/ECC)”算法来确保数据的正确性。
FLASH芯片有很多种芯片型号,在我们的norflash.h头文件中有定义芯片ID的宏定义,对应的就是不同型号的NOR FLASH芯片,比如有:W25Q128、BY25Q128、NM25Q128,它们是来自不同的厂商的同种规格的NOR FLASH芯片,内存空间都是128M字,即16M字节。注意:它们的很多参数、操作都是一样的,所以我们的实验都是兼容它们的。
下面我们以NM25Q128为例,认识一下具体的NOR Flash的特性。
NM25Q128是一款大容量SPI FLASH产品,其容量为16M。它将16M字节的容量分为256个块(Block),每个块大小为64K字节,每个块又分为16个扇区(Sector),每一个扇区16页,每页256个字节,即每个扇区4K个字节。NM25Q128的最小擦除单位为一个扇区,也就是每次必须擦除4K个字节。这样我们需要给NM25Q128开辟一个至少4K的缓存区,这样对SRAM要求比较高,要求芯片必须有4K以上SRAM才能很好的操作。
NM25Q128的擦写周期多达10W次,具有20年的数据保存期限,支持电压为2.7~3.6V,NM25Q128支持标准的SPI,还支持双输出/四输出的SPI,最大SPI时钟可以到80Mhz(双输出时相当于160Mhz,四输出时相当于320Mhz)。
下面我们看一下NM25Q128芯片的管脚图,如图27.1.2.1.1所示:
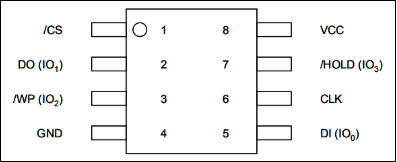
图 27.1.2.1.1 NM25Q128芯片引脚图
芯片引脚连接如下:CS即片选信号输入,低电平有效;DO是MISO引脚,在CLK管脚的下降沿输出数据;WP是写保护管脚,高电平可读可写,低电平仅仅可读;DI是MOSI引脚,主机发送的数据、地址和命令从SI引脚输入到芯片内部,在CLK管脚的上升沿捕获数据;CLK是串行时钟引脚,为输入输出提供时钟脉冲;HOLD是保持管脚,低电平有效。
STM32G474通过SPI总线连接到NM25Q128对应的引脚即可启动数据传输。
27.1.2.2 NOR FLASH工作时序
前面对于NM25Q128的介绍中也提及其存储的体系,NM25Q128有写入、读取还有擦除的功能,下面就对这三种操作的时序进行分析,在后面通过代码的形式驱动它。
下面先让我们看一下读操作时序,如图27.1.2.2.1所示:
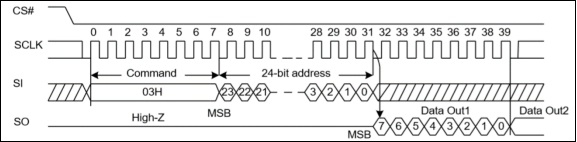
图27.1.2.2.1 NM25Q128读操作时序图
从上图可知读数据指令是03H,可以读出一个字节或者多个字节。发起读操作时,先把CS片选管脚拉低,然后通过MOSI引脚把03H发送芯片,之后再发送要读取的24位地址,这些数据在CLK上升沿时采样。芯片接收完24位地址之后,就会把相对应地址的数据在CLK引脚下降沿从MISO引脚发送出去。从图中可以看出只要CLK一直在工作,那么通过一条读指令就可以把整个芯片存储区的数据读出来。当主机把CS引脚拉高,数据传输停止。
接着我们看一下写时序,这里我们先看页写时序,如图27.1.2.2.2所示:
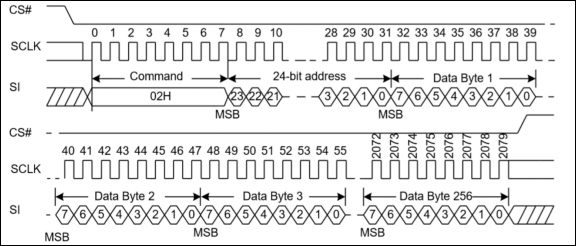
图27.1.2.2.2 NM25Q128页写时序
在发送页写指令之前,需要先发送“写使能”指令。然后主机拉低CS引脚,然后通过MOSI引脚把02H发送到芯片,接着发送24位地址,最后你就可以发送你需要写的字节数据到芯片。完成数据写入之后,需要拉高CS引脚,停止数据传输。
下面介绍一下扇区擦除时序,如图27.1.2.2.3所示:
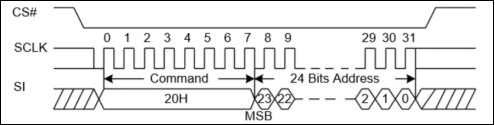
图27.1.2.2.3 扇区擦除时序图
扇区擦除指的是将一个扇区擦除,通过前面的介绍也知道,NM25Q128的扇区大小是4K字节。擦除扇区后,扇区的位全置1,即扇区字节为FFh。同样的,在执行扇区擦除之前,需要先执行写使能指令。这里需要注意的是当前SPI总线的状态,假如总线状态是BUSY,那么这个扇区擦除是无效的,所以在拉低CS引脚准备发送数据前,需要先确定SPI总线的状态,这就需要执行读状态寄存器指令,读取状态寄存器的BUSY位,需要等待BUSY位为0,才可以执行擦除工作。
接着按时序图分析,主机先拉低CS引脚,然后通过MOSI引脚发送指令代码20h到芯片,然后接着把24位扇区地址发送到芯片,然后需要拉高CS引脚,通过读取寄存器状态等待扇区擦除操作完成。
此外还有对整个芯片进行擦除的操作,时序比扇区擦除更加简单,不用发送24bit地址,只需要发送指令代码C7h到芯片即可实现芯片的擦除。
在NM25Q128手册中还有许多种方式的读/写/擦除操作,我们这里只分析本实验用到的,其他大家可以参考NM25Q128手册。
27.2 硬件设计
1. 例程功能
通过KEY1按键来控制norflash的写入,通过按键KEY0来控制norflash的读取。并在LCD模块上显示相关信息。我们还可以通过USMART控制读取norflash的ID、擦除某个扇区或整片擦除。LED0闪烁用于提示程序正在运行。
2. 硬件资源
1)LED灯
LED0 – PE0
2)独立按键
KEY0 – PE12
KEY1 – PE13
3)串口1(PB6/PB7连接在板载USB转串口芯片CH340上面)
4)正点原子1.3寸TFTLCD模块(SPI接口)
5)SPI1(PB3/PB4/PB5/PB8)
6)norflash(本例程使用的是W25Q128,连接在SPI1)
3. 原理图
我们主要来看看norflash和开发板的连接,如图27.2.1所示:
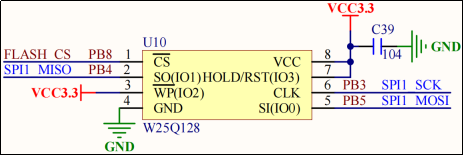
图27.2.1 NOR FLASH与开发板的连接原理
通过上图可知,NOR FLASH的CS、SCK、MISO和MOSI分别连接在PB8、PB3、PB4和PB5上。本实验还支持多种型号的SPI FLASH芯片,比如:BY25Q128/NM25Q128/W25Q128等等,具体请看norflash.h文件的宏定义,在程序上只需要稍微修改一下,后面讲解程序的时候会提到。
27.3 程序设计
27.3.1 SPI的HAL库驱动
SPI在HAL库中的驱动代码在stm32g4xx_hal_spi.c文件(及其头文件)中。
1. HAL_SPI_Init函数
SPI的初始化函数,其声明如下:
HAL_StatusTypeDef HAL_SPI_Init(SPI_HandleTypeDef *hspi);
l 函数描述:
用于初始化SPI。
l 函数形参:
形参1是SPI_HandleTypeDef结构体类型指针变量,其定义如下:
typedef struct __SPI_HandleTypeDef
{
SPI_TypeDef *Instance; /* SPI寄存器基地址 */
SPI_InitTypeDef Init; /* SPI通信参数 */
uint8_t *pTxBuffPtr; /* SPI的发送缓存 */
uint16_t TxXferSize; /* SPI的发送数据大小 */
__IO uint16_t TxXferCount; /* SPI发送端计数器 */
uint8_t *pRxBuffPtr; /* SPI的接收缓存 */
uint16_t RxXferSize; /* SPI的接收数据大小 */
__IO uint16_t RxXferCount; /* SPI接收端计数器 */
uint32_t CRCSize; /* SPI的CRC大小 */
void (*RxISR)(struct __SPI_HandleTypeDef *hspi); /* SPI的接收端中断服务函数 */
void (*TxISR)(struct __SPI_HandleTypeDef *hspi); /* SPI的发送端中断服务函数 */
DMA_HandleTypeDef *hdmatx; /* SPI发送参数设置(DMA) */
DMA_HandleTypeDef *hdmarx; /* SPI接收参数设置(DMA) */
HAL_LockTypeDef Lock; /* SPI锁对象 */
__IO HAL_SPI_StateTypeDef State; /* SPI传输状态 */
__IO uint32_t ErrorCode; /* SPI操作错误代码 */
} SPI_HandleTypeDef;
我们这里主要讲解第二个成员变量Init,它是SPI_InitTypeDef结构体类型,该结构体定义如下:
typedef struct
{
uint32_t Mode; /* 模式:主:SPI_MODE_MASTER 从:SPI_MODE_SLAVE */
uint32_t Direction; /* 方向:只接收模式 单线双向通信数据模式 全双工 */
uint32_t DataSize; /* 数据帧格式:8位/16位 */
uint32_t CLKPolarity; /* 时钟极性CPOL 高/低电平 */
uint32_t CLKPhase; /* 时钟相位 奇/偶数边沿采集 */
uint32_t NSS; /* SS信号由硬件(NSS)管脚控制还是软件控制 */
uint32_t BaudRatePrescaler; /* 设置SPI波特率预分频值*/
uint32_t FirstBit; /* 起始位是MSB还是LSB */
uint32_t TIMode; /* 帧格式 SPI motorola模式还是TI模式 */
uint32_t CRCCalculation; /* 硬件CRC是否使能 */
uint32_t CRCPolynomial; /* 设置CRC多项式*/
uint32_t CRCLength; /* CRC长度 */
uint32_t NSSPMode; /* NSSP模式*/
} SPI_InitTypeDef;
l 函数返回值:
HAL_StatusTypeDef枚举类型的值。
使用SPI传输数据的配置步骤
1)SPI参数初始化(工作模式、数据时钟极性、时钟相位等)。
HAL库通过调用SPI初始化函数HAL_SPI_Init完成对SPI参数初始化,详见例程源码。
注意:该函数会调用:HAL_SPI_MspInit函数来完成对SPI底层的初始化,包括:SPI及GPIO时钟使能、GPIO模式设置等。
2)使能SPI时钟和配置相关引脚的复用功能。
本实验用到SPI1,使用PB3、PB4和PB5作为SPI_SCK、SPI_MISO和SPI_MOSI,因此需要先使能SPI1和GPIOB时钟。参考代码如下:
__HAL_RCC_SPI1_CLK_ENABLE(); __HAL_RCC_GPIOB_CLK_ENABLE();
IO口复用功能是通过函数HAL_GPIO_Init来配置的。
3)使能SPI
通过__HAL_SPI_ENABLE函数使能SPI,便可进行数据传输。
4)SPI传输数据
通过HAL_SPI_Transmit函数进行发送数据。
通过HAL_SPI_Receive函数进行接收数据。
也可以通过HAL_SPI_TransmitReceive函数进行发送与接收操作。
5)设置SPI传输速度
SPI初始化结构体SPI_InitTypeDef有一个成员变量是BaudRatePrescaler,该成员变量用来设置SPI的预分频系数,从而决定了SPI的传输速度。但是HAL库并没有提供单独的SPI分频系数修改函数,如果我们需要在程序中偶尔修改速度,那么我们就要通过设置SPI_CR1寄存器来修改,具体实现方法请参考后面软件设计小节相关函数。
27.3.2 程序流程图

图27.3.2.1 SPI实验程序流程图
27.3.3 程序解析
本实验中,我们通过调用HAL库的函数去驱动SPI进行通信,所以需要在工程中的Driver/STM32G4xx_HAL_Driver分组下添加stm32g4xx_hal_spi.c文件。实验工程中,我们新增了spi.c存放spi底层驱动代码,norflash.c文件存放BY25Q128/W25Q128/NM25Q128驱动。
1. SPI驱动代码
这里我们只讲解核心代码,详细的源码请大家参考光盘本实验对应源码。SPI驱动源码包括两个文件:spi.c和spi.h。
下面我们直接介绍SPI相关的程序,首先先介绍spi.h文件,其定义如下:
/* SPI1相关定义 */
#define SPI1_SCK_GPIO_PORT GPIOB
#define SPI1_SCK_GPIO_PIN GPIO_PIN_3
#define SPI1_SCK_GPIO_AF GPIO_AF5_SPI1
#define SPI1_SCK_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE();
}while(0) /* PB口时钟使能 */
#define SPI1_MOSI_GPIO_PORT GPIOB
#define SPI1_MOSI_GPIO_PIN GPIO_PIN_5
#define SPI1_MOSI_GPIO_AF GPIO_AF5_SPI1
#define SPI1_MOSI_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE();
}while(0) /* PB口时钟使能 */
#define SPI1_SPI SPI1
#define SPI1_SPI_CLK_ENABLE() do{ __HAL_RCC_SPI1_CLK_ENABLE();
}while(0) /* SPI1时钟使能 */
我们通过宏定义标识符的方式去定义SPI通信用到的两个管脚SCK和MOSI,同时还宏定义SPI1的相关信息。注意:因为STM32G474电机开发板的TFTLCD和NORFLASH共用SPI1接口(SPI1的MISO和LCD的WR信号共用PB4引脚),因此需要分时复用。
接下来我们看一下spi.c代码中的初始化函数,代码如下:
/**
* @brief SPI初始化代码
* @note 主机模式,8位数据,禁止硬件片选
* @param 无
* @retval 无
*/
void spi1_init(void)
{
SPI1_SPI_CLK_ENABLE(); /* SPI1时钟使能 */
g_spi1_handler.Instance = SPI1_SPI; /* SPI1 */
/* 设置SPI工作模式,设置为主模式 */
g_spi1_handler.Init.Mode = SPI_MODE_MASTER;
/* 设置SPI单向或者双向的数据模式:SPI设置为双线模式 */
g_spi1_handler.Init.Direction = SPI_DIRECTION_2LINES;
/* 设置SPI的数据大小:SPI发送接收8位帧结构 */
g_spi1_handler.Init.DataSize = SPI_DATASIZE_8BIT;
/* 串行同步时钟的空闲状态为高电平 */
g_spi1_handler.Init.CLKPolarity = SPI_POLARITY_HIGH;
/* 串行同步时钟的第二个跳变沿(上升或下降)数据被采样 */
g_spi1_handler.Init.CLKPhase = SPI_PHASE_2EDGE;
/* NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制 */
g_spi1_handler.Init.NSS = SPI_NSS_SOFT;
/* 定义波特率预分频的值:波特率预分频值为4 */
g_spi1_handler.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_4;
/* 指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始 */
g_spi1_handler.Init.FirstBit = SPI_FIRSTBIT_MSB;
g_spi1_handler.Init.TIMode = SPI_TIMODE_DISABLE; /* 关闭TI模式 */
/* 关闭硬件CRC校验 */
g_spi1_handler.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
g_spi1_handler.Init.CRCPolynomial = 10; /* CRC值计算的多项式 */
HAL_SPI_Init(&g_spi1_handler); /* 初始化 */
__HAL_SPI_ENABLE(&g_spi1_handler); /* 使能SPI1 */
/* 启动传输, 实际上就是产生8个时钟脉冲, 达到清空DR的作用, 非必需 */
spi1_read_write_byte(0XFF);
}
在spi_init函数中主要工作就是对于SPI参数的配置,这里包括工作模式、数据模式、数据大小、时钟极性、时钟相位、波特率预分频值等。关于SPI的管脚配置就放在了HAL_SPI_MspInit函数里,其代码如下:
/**
* @brief SPI底层驱动,时钟使能,引脚配置
* @note 此函数会被HAL_SPI_Init()调用
* @param hspi:SPI句柄
* @retval 无
*/
void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi)
{
GPIO_InitTypeDef gpio_init_struct;
if (hspi->Instance == SPI1_SPI)
{
SPI1_SCK_GPIO_CLK_ENABLE(); /* SPI1_SCK脚时钟使能 */
SPI1_MOSI_GPIO_CLK_ENABLE(); /* SPI1_MOSI脚时钟使能 */
/* SCK引脚模式设置(复用输出) */
gpio_init_struct.Pin = SPI1_SCK_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_AF_PP;
gpio_init_struct.Pull = GPIO_PULLUP;
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH;
gpio_init_struct.Alternate = SPI1_SCK_GPIO_AF;
HAL_GPIO_Init(SPI1_SCK_GPIO_PORT, &gpio_init_struct);
/* MOSI引脚模式设置(复用输出) */
gpio_init_struct.Pin = SPI1_MOSI_GPIO_PIN;
gpio_init_struct.Alternate = SPI1_MOSI_GPIO_AF;
HAL_GPIO_Init(SPI1_MOSI_GPIO_PORT, &gpio_init_struct);
}
}
通过以上两个函数的作用就可以完成SPI初始。接下来介绍SPI的发送和接收函数,其定义如下:
/**
* @brief SPI1读写一个字节数据
* @param txdata : 要发送的数据(1字节)
* @retval 接收到的数据(1字节)
*/
uint8_t spi1_read_write_byte(uint8_t txdata)
{
uint8_t rxdata;
HAL_SPI_TransmitReceive(&g_spi1_handler, &txdata, &rxdata, 1, 1000);
return rxdata; /* 返回收到的数据 */
}
这里的spi_read_write_byte函数直接调用了HAL库内置的函数进行接收发送操作。前面已经有介绍了,这里就不展开对HAL_SPI_TransmitReceive函数的解析。
由于不同的外设需要的通信速度不一样,所以这里我们定义了一个速度设置函数,通过操作寄存器的方式去实现,其代码如下:
/**
* @brief SPI1速度设置函数
* @note SPI1时钟选择来自APB2, 即PCLK2, 为170Mhz
* SPI速度 = PCLK2 / 2^(speed + 1)
* @param speed : SPI1时钟分频系数
取值为SPI_BAUDRATEPRESCALER_2~SPI_BAUDRATEPRESCALER_2 256
* @retval 无
*/
void spi1_set_speed(uint8_t speed)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(speed)); /* 判断有效性 */
__HAL_SPI_DISABLE(&g_spi1_handler); /* 关闭SPI */
g_spi1_handler.Instance->CR1 &= 0xFFC7; /* 位3-5清零,用来设置波特率 */
g_spi1_handler.Instance->CR1 |= speed << 3; /* 设置SPI速度 */
__HAL_SPI_ENABLE(&g_spi1_handler); /* 使能SPI */
}
2. norflash驱动代码
这里我们只讲解核心代码,详细的源码请大家参考光盘本实验对应源码。NOR FLASH驱动源码包括两个文件:norflash.c和norflash.h。
在上一小节已经对SPI协议需要用到的东西都封装好了。那么现在就要在SPI通信的基础上,通过前面分析的NM25Q128的工作时序拟定通信代码。
由于这部分的代码量比较多,这里就不一一贴出来介绍。介绍几个重点,其余的请自行查看源码。首先是norflash.h头文件,我们做了一个FLASH芯片列表(宏定义),这些宏定义是一些支持的FLASH芯片的ID。接下来是FLASH芯片指令表的宏定义,这个请参考FLASH芯片手册比对得到,这里就不将代码列出来了。
下面介绍norflash.c文件几个重要的函数,首先是两个特殊的函数,其定义如下:
/**
* @brief 切换为spi_flash模式
* @note 因为lcd和spi_flash共用一个SPI1,
当从lcd切换回spiflash时需要对引脚功能进行配置,切换回SPI_MISO功能
* @param 无
* @retval 无
*/
void sw_spiflash_mode(void)
{
GPIO_InitTypeDef gpio_init_struct = {0};
SPI1_MISO_GPIO_CLK_ENABLE(); /* SPI1_MISO脚时钟使能 */
gpio_init_struct.Pin = SPI1_MISO_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_AF_PP;
gpio_init_struct.Pull = GPIO_PULLUP;
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH;
gpio_init_struct.Alternate = SPI1_MISO_GPIO_AF;
HAL_GPIO_Init(SPI1_MISO_GPIO_PORT, &gpio_init_struct);
}
/**
* @brief 切换为lcd模式
* @note 因为lcd和spi_flash共用,
当从spiflash切换回lcd时需要对引脚功能进行配置,切换回lcd模式
* @param 无
* @retval 无
*/
void sw_lcd_mode(void)
{
GPIO_InitTypeDef gpio_init_struct = {0};
SPI1_MISO_GPIO_CLK_ENABLE();
gpio_init_struct.Pin = SPI1_MISO_GPIO_PIN; /* LCD_WR引脚 */
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
HAL_GPIO_Init(SPI1_MISO_GPIO_PORT, &gpio_init_struct); /* 初始化LCD_WR引脚 */
}
因为STM32G474电机开发板的TFTLCD和NORFLASH共用SPI1接口(SPI1的MISO和LCD的WR信号共用PB4引脚),因此需要分时复用,这两个函数就是实现分时复用的关键,它们本质上就是对PB4进行了初始化配置。
接下来看NOR FLASH初始化函数,其定义如下:
/**
* @brief 初始化SPI NOR FLASH
* @param 无
* @retval 无
*/
void norflash_init(void)
{
uint8_t temp;
NORFLASH_CS_GPIO_CLK_ENABLE(); /* NORFLASH CS脚时钟使能 */
/* CS引脚模式设置(复用输出) */
GPIO_InitTypeDef gpio_init_struct;
gpio_init_struct.Pin = NORFLASH_CS_GPIO_PIN;
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP;
gpio_init_struct.Pull = GPIO_PULLUP;
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(NORFLASH_CS_GPIO_PORT, &gpio_init_struct);
NORFLASH_CS(1); /* 取消片选 */
spi1_init(); /* 初始化SPI1 */
g_norflash_type = norflash_read_id(); /* 读取FLASH ID. */
if (g_norflash_type == W25Q256) /* SPI FLASH为W25Q256, 必须使能4字节地址模式 */
{
temp = norflash_read_sr(3); /* 读取状态寄存器3,判断地址模式 */
if ((temp & 0x01) == 0) /* 如果不是4字节地址模式,则进入4字节地址模式 */
{
norflash_write_enable(); /* 写使能 */
temp |= 1 << 1; /* ADP=1, 上电4位地址模式 */
norflash_write_sr(3, temp); /* 写SR3 */
sw_spiflash_mode();
NORFLASH_CS(0);
spi1_read_write_byte(FLASH_Enable4ByteAddr); /* 使能4字节地址指令 */
NORFLASH_CS(1);
sw_lcd_mode();
}
}
}
在初始化函数中,将SPI通信协议用到的CS引脚配置好,然后尝试读取flash的ID,由于W25Q256的容量比较大,通信的时候需要4个字节,为了函数的兼容性,我们这里做了判断处理。当然,我们使用的W25Q128是3字节地址模式的。如果能读到ID则说明我们的SPI时序能正常操作Flash,便可以通过SPI接口读写NOR FLASH的数据了。
进行其它数据操作时,由于每一次读写操作的时候都需要发送地址,所以这里我们把这个板块封装成函数,函数名是norflash_send_address,实质上就是通过SPI的发送接收函数spi1_read_write_byte实现的,这里就不列出来了,大家可以查看光盘源码。
下面介绍一下FLASH读取函数,这里可以根据前面的时序图对照理解,其定义如下:
/**
* @brief 读取SPI FLASH
* @note 在指定地址开始读取指定长度的数据
* @param pbuf : 数据存储区
* @param addr : 开始读取的地址(最大32bit)
* @param datalen : 要读取的字节数(最大65535)
* @retval 无
*/
void norflash_read(uint8_t *pbuf, uint32_t addr, uint16_t datalen)
{
uint16_t i;
sw_spiflash_mode();
NORFLASH_CS(0);
spi1_read_write_byte(FLASH_ReadData); /* 发送读取命令 */
norflash_send_address(addr); /* 发送地址 */
for (i = 0; i < datalen; i++)
{
pbuf[i] = spi1_read_write_byte(0xFF); /* 循环读取 */
}
NORFLASH_CS(1);
sw_lcd_mode();
}
该函数用于从NOR FLASH的指定位置读出指定长度的数据,由于NOR FLASH支持以任意地址(但是不能超过NOR FLASH的地址范围)开始读取数据,所以,这个代码相对来说比较简单。首先拉低片选信号,发送读取命令,接着发送24位地址之后,程序就可以开始循环读数据,其地址就会自动增加,读取完数据后,需要拉高片选信号,结束通信。
有读函数,那肯定就有写函数,接下来我们介绍一下NOR FLASH写函数,其定义如下:
/**
* @brief 写SPI FLASH
* @note 在指定地址开始写入指定长度的数据, 该函数带擦除操作!
* SPI FLASH 一般是: 256个字节为一个Page,
4Kbytes为一个Sector, 16个扇区为1个Block
* 擦除的最小单位为Sector.
*
* @param pbuf : 数据存储区
* @param addr : 开始写入的地址(最大32bit)
* @param datalen : 要写入的字节数(最大65535)
* @retval 无
*/
uint8_t g_norflash_buf[4096]; /* 扇区缓存 */
void norflash_write(uint8_t *pbuf, uint32_t addr, uint16_t datalen)
{
uint32_t secpos;
uint16_t secoff;
uint16_t secremain;
uint16_t i;
uint8_t *norflash_buf;
norflash_buf = g_norflash_buf;
secpos = addr / 4096; /* 扇区地址 */
secoff = addr % 4096; /* 在扇区内的偏移 */
secremain = 4096 - secoff; /* 扇区剩余空间大小 */
if (datalen <= secremain)
{
secremain = datalen; /* 不大于4096个字节 */
}
while (1)
{
/* 切换为FLASH,在USB读写大数据的时候不切换会导致屏幕黑屏 */
sw_spiflash_mode();
norflash_read(norflash_buf, secpos * 4096, 4096); /* 读出整个扇区的内容 */
for (i = 0; i < secremain; i++) /* 校验数据 */
{
if (norflash_buf[secoff + i] != 0XFF)
{
break; /* 需要擦除, 直接退出for循环 */
}
}
if (i < secremain) /* 需要擦除 */
{
norflash_erase_sector(secpos); /* 擦除这个扇区 */
for (i = 0; i < secremain; i++) /* 复制 */
{
norflash_buf[i + secoff] = pbuf[i];
}
/* 写入整个扇区 */
norflash_write_nocheck(norflash_buf, secpos * 4096, 4096);
}
else /* 写已经擦除了的,直接写入扇区剩余区间. */
{
norflash_write_nocheck(pbuf, addr, secremain); /* 直接写扇区 */
}
if (datalen == secremain)
{
sw_lcd_mode(); /* 数据写完成,切换为LCD模式 */
break; /* 写入结束了 */
}
else /* 写入未结束 */
{
secpos++; /* 扇区地址增1 */
secoff = 0; /* 偏移位置为0 */
pbuf += secremain; /* 指针偏移 */
addr += secremain; /* 写地址偏移 */
datalen -= secremain; /* 字节数递减 */
if (datalen > 4096)
{
secremain = 4096; /* 下一个扇区还是写不完 */
}
else
{
secremain = datalen; /* 下一个扇区可以写完了 */
}
}
}
}
该函数可以在NOR FLASH的任意地址开始写入任意长度(必须不超过NOR FLASH的容量)的数据。我们这里简单介绍一下思路:先获得首地址(WriteAddr)所在的扇区,并计算在扇区内的偏移,然后判断要写入的数据长度是否超过本扇区所剩下的长度,如果不超过,再先看看是否要擦除,如果不要,则直接写入数据即可,如果要则读出整个扇区,在偏移处开始写入指定长度的数据,然后擦除这个扇区,再一次性写入。当所需要写入的数据长度超过一个扇区的长度的时候,我们先按照前面的步骤把扇区剩余部分写完,再在新扇区内执行同样的操作,如此循环,直到写入结束。这里我们还定义了一个g_norflash_buf的全局变量,用于擦除时缓存扇区内的数据。
简单介绍一下写函数的实质调用,它用到的是通过无检验写SPI_FLASH函数实现的,而最终是用到页写函数norflash_write_page,在前面也对页写时序进行了分析,现在看一下代码:
/**
* @brief SPI在一页(0~65535)内写入少于256个字节的数据
* @note 在指定地址开始写入最大256字节的数据
* @param pbuf : 数据存储区
* @param addr : 开始写入的地址(最大32bit)
* @param datalen : 要写入的字节数(最大256),该数不应该超过该页的剩余字节数!!!
* @retval 无
*/
static void norflash_write_page(uint8_t *pbuf, uint32_t addr, uint16_t datalen)
{
uint16_t i;
norflash_write_enable(); /* 写使能 */
sw_spiflash_mode();
NORFLASH_CS(0);
spi1_read_write_byte(FLASH_PageProgram); /* 发送写页命令 */
norflash_send_address(addr); /* 发送地址 */
for (i = 0; i < datalen; i++)
{
spi1_read_write_byte(pbuf[i]); /* 循环读取 */
}
NORFLASH_CS(1);
sw_lcd_mode();
norflash_wait_busy(); /* 等待写入结束 */
}
在页写功能的代码中,先发送写使能命令,才发送页写命令,然后发送写入的地址,再把写入的内容通过一个for循环写入,发送完后拉高片选CS引脚结束通信,等待flash内部写入结束。检测flash内部的状态可以通过查看NM25Qxx状态寄存器1的位0。在这里科普一下NM25Qxx的状态寄存器,可以通过寄存器相关位判断NM25Qxx的状态,下面是NM25Qxx状态寄存器表:

表27.3.3.1 NM25Qxx状态寄存器表
我们也定义了一个函数norflash_read_sr,去读取NM25Qxx状态寄存器的值,这里就不列出来了,主要实现的方式也是老套路:根据传参判断需要获取的是哪个状态寄存器,然后拉低片选线,调用spi1_read_write_byte函数发送该寄存器的命令,然后通过发送一字节空数据获取读取到的数据,最后拉高片选线,函数返回读取到的值。
在norflash_write_page函数的基础上,增加了norflash_write_nocheck函数进行封装解决写入字节可能大于该页剩下的字节数问题,方便解决写入错误问题,其代码如下:
/**
* @brief 无检验写SPI FLASH
* @note 必须确保所写的地址范围内的数据全部为0XFF,否则在非0XFF处写入的数据将失败!
* 具有自动换页功能
* 在指定地址开始写入指定长度的数据,但是要确保地址不越界!
*
* @param pbuf : 数据存储区
* @param addr : 开始写入的地址(最大32bit)
* @param datalen : 要写入的字节数(最大65535)
* @retval 无
*/
static void norflash_write_nocheck(uint8_t *pbuf, uint32_t addr, uint16_t datalen)
{
uint16_t pageremain;
pageremain = 256 - addr % 256; /* 单页剩余的字节数 */
if (datalen <= pageremain) /* 不大于256个字节 */
{
pageremain = datalen;
}
while (1)
{
/* 当写入字节比页内剩余地址还少的时候, 一次性写完
* 当写入直接比页内剩余地址还多的时候, 先写完整个页内剩余地址,
然后根据剩余长度进行不同处理
*/
norflash_write_page(pbuf, addr, pageremain);
if (datalen == pageremain) /* 写入结束了 */
{
break;
}
else /* datalen > pageremain */
{
pbuf += pageremain; /* pbuf指针地址偏移,前面已经写了pageremain字节 */
addr += pageremain; /* 写地址偏移,前面已经写了pageremain字节 */
datalen -= pageremain; /* 写入总长度减去已经写入了的字节数 */
if (datalen > 256) /* 剩余数据还大于一页,可以一次写一页 */
{
pageremain = 256; /* 一次可以写入256个字节 */
}
else /* 剩余数据小于一页,可以一次写完 */
{
pageremain = datalen; /* 不够256个字节了 */
}
}
}
}
上面函数的实现主要是逻辑处理,通过判断传参中的写入字节的长度与单页剩余的字节数,来决定是否是需要在新页写入剩下的字节。这里需要大家自行理解一下。通过调用该函数实现了norflash_write的功能。
下面简单介绍一下擦除函数norflash_erase_sector,前面工作时序中也有对此描述,现在就来看一下代码:
/**
* @brief 擦除一个扇区
* @note 注意,这里是扇区地址,不是字节地址!!
* 擦除一个扇区的最少时间:150ms
*
* @param saddr : 扇区地址 根据实际容量设置
* @retval 无
*/
void norflash_erase_sector(uint32_t saddr)
{
saddr *= 4096;
norflash_write_enable(); /* 写使能 */
norflash_wait_busy(); /* 等待空闲 */
sw_spiflash_mode();
NORFLASH_CS(0);
spi1_read_write_byte(FLASH_SectorErase); /* 发送写页命令 */
norflash_send_address(saddr); /* 发送地址 */
NORFLASH_CS(1);
sw_lcd_mode();
norflash_wait_busy(); /* 等待扇区擦除完成 */
}
该代码也是老套路,通过发送擦除指令实现擦除功能,要注意的是使用扇区擦除指令前,需要先发送写使能指令,拉低片选线,发送扇区擦除指令之后,发送擦除的扇区地址,实现擦除,最后拉高片选线结束通信。在函数最后通过读取寄存器状态的函数,等待扇区擦除完成。
3. main.c代码
在main.c里面编写如下代码:
const uint8_t g_text_buf[] = {"STM32 SPI TEST"}; /* 要写到FLASH的字符串数组 */
#define TEXT_SIZE sizeof(g_text_buf) /* TEXT字符串长度 */
int main(void)
{
uint8_t key;
uint16_t i = 0;
uint8_t datatemp[TEXT_SIZE];
uint32_t flashsize;
uint16_t id = 0;
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(85, 2, 2, 4, 8); /* 设置时钟,170Mhz */
delay_init(170); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
usmart_dev.init(170); /* 初始化USMART */
led_init(); /* 初始化LED */
lcd_init(); /* 初始化LCD */
key_init(); /* 初始化按键 */
norflash_init(); /* 初始化NORFLASH */
/* 显示提示信息 */
lcd_show_string(10, 10, 140, 32, 32, "STM32", RED);
lcd_show_string(10, 42, 140, 24, 24, "SPI TEST", RED);
lcd_show_string(10, 66, 140, 24, 24, "ATOM@ALIENTEK", RED);
lcd_show_string(10, 96, 200, 16, 16, "KEY1:Write KEY0:Read", RED);
id = norflash_read_id(); /* 读取FLASH ID */
while ((id == 0) || (id == 0XFFFF)) /* 检测不到FLASH芯片 */
{
lcd_show_string(10, 120, 200, 16, 16, "FLASH Check Failed!", RED);
delay_ms(500);
lcd_show_string(10, 120, 200, 16, 16, "Please Check! ", RED);
delay_ms(500);
LED0_TOGGLE(); /* LED0闪烁 */
}
lcd_show_string(10, 120, 200, 16, 16, "SPI FLASH Ready!", BLUE);
flashsize = 16 * 1024 * 1024; /* FLASH 大小为16M字节 */
while (1)
{
key = key_scan(0);
if (key == KEY1_PRES) /* KEY1按下,写入 */
{
lcd_fill(0, 140, 239, 239, WHITE); /* 清除下半屏 */
lcd_show_string(10, 140, 200, 16, 16, "Start Write FLASH....", BLUE);
sprintf((char *)datatemp, "%s%d", (char *)g_text_buf, i);
/* 从倒数第100个地址处开始,写入SIZE长度的数据 */
norflash_write((uint8_t *)datatemp, flashsize - 100, TEXT_SIZE);
/* 提示传送完成 */
lcd_show_string(10, 140, 200, 16, 16, "FLASH Write Finished!", BLUE);
}
if (key == KEY0_PRES) /* KEY0按下,读取字符串并显示 */
{
lcd_show_string(10, 140, 200, 16, 16, "Start Read FLASH....", BLUE);
/* 从倒数第100个地址处开始,读出SIZE个字节 */
norflash_read(datatemp, flashsize - 100, TEXT_SIZE);
/* 提示传送完成 */
lcd_show_string(10, 140, 200, 16, 16, "The Data Readed Is: ", BLUE);
/* 显示读到的字符串 */
lcd_show_string(10, 160, 200, 16, 16, (char *)datatemp, BLUE);
printf("%s\r\n",(char *)datatemp);
}
i++;
if (i == 20)
{
LED0_TOGGLE(); /* LED0闪烁 */
i = 0;
}
delay_ms(10);
}
}
在main函数前面,我们定义了g_text_buf数组,用于存放要写入到FLASH的字符串。main函数代码和IIC实验那部分代码大同小异,具体流程大致是:在完成系统级和用户级初始化工作后,读取FLASH的ID,然后通过KEY0去读取倒数第100个地址处开始的数据并把数据显示在LCD上;另外还可以通过KEY1去倒数第100个地址处写入g_text_buf数据并在LCD界面中显示传输中,完成后并显示“FLASH Write Finished!”。
27.4 下载验证
将程序下载到开发板后,可以看到LED0不停的闪烁,提示程序已经在运行了。LCD显示的内容如图27.4.1所示:
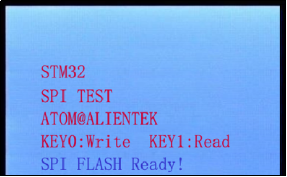
图27.4.1 SPI实验程序运行效果图
通过先按下KEY1写入数据,然后再按KEY0读取数据,得到如图27.4.2所示:
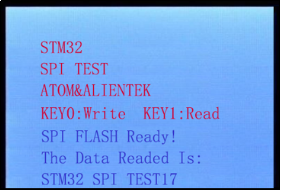
图27.4.2 操作后的显示效果图
程序在开机的时候会检测Norflash是否存在,如果不存在则会在 TFTLCD 模块上显示错误信息,同时LED0慢闪。
该实验还支持USMART,在这里我们加入了norflash_read_id和norflash_erase_chip以及norflash_erase_sector函数。可以通过USMART调用norflash_read_id函数去读取SPI_FLASH的ID,也可以调用另外两个擦除函数。需要注意的是假如调用了norflash_erase_chip函数将会对整个SPI_FLASH进行擦除,一般情况不建议对整个SPI_FLASH进行擦除,因为会导致字库和综合例程所需要的系统文件全部丢失。