? Zak-OTFS 高移动性通感一体化仿真平台
基于离散 Zak 变换的下一代 6G 波形完整实现 结晶化信道 (Crystallization) + 通感一体化 (ISAC) + 分数多普勒处理
? 为什么选择 Zak-OTFS?
在 6G 高铁 (350+ km/h)、 低轨卫星 (LEO, 7.8 km/s) 和 车联网 (V2X) 场景下,传统 OFDM 波形面临严重的载波间干扰 (ICI)。本平台基于 Zak-OTFS —— 一种基于离散 Zak 变换 (DZT) 的下一代波形技术,提供了比传统 OTFS 更优雅的理论框架和更低的实现复杂度。
| 痛点 (OFDM/5G NR) | 本平台解决方案 (Zak-OTFS) |
|---|---|
| ? ICI 干扰严重 | ✅ DD 域时不变性:信道在时延-多普勒域准静态,消除快衰落影响 |
| ? 高速导致 BER 地板 | ✅ 全分集增益:每个符号经历全部多径,实现 500km/h+ 鲁棒传输 |
| ? 传统 OTFS 需复杂均衡 | ✅ 结晶化信道:满足 Crystallization 条件时信道对角化,仅需 单抽头均衡 |
| ? 高计算复杂度 | ✅ O(MN) 复杂度:DZT 实现仅需 1D FFT,远优于传统 2D SFFT |
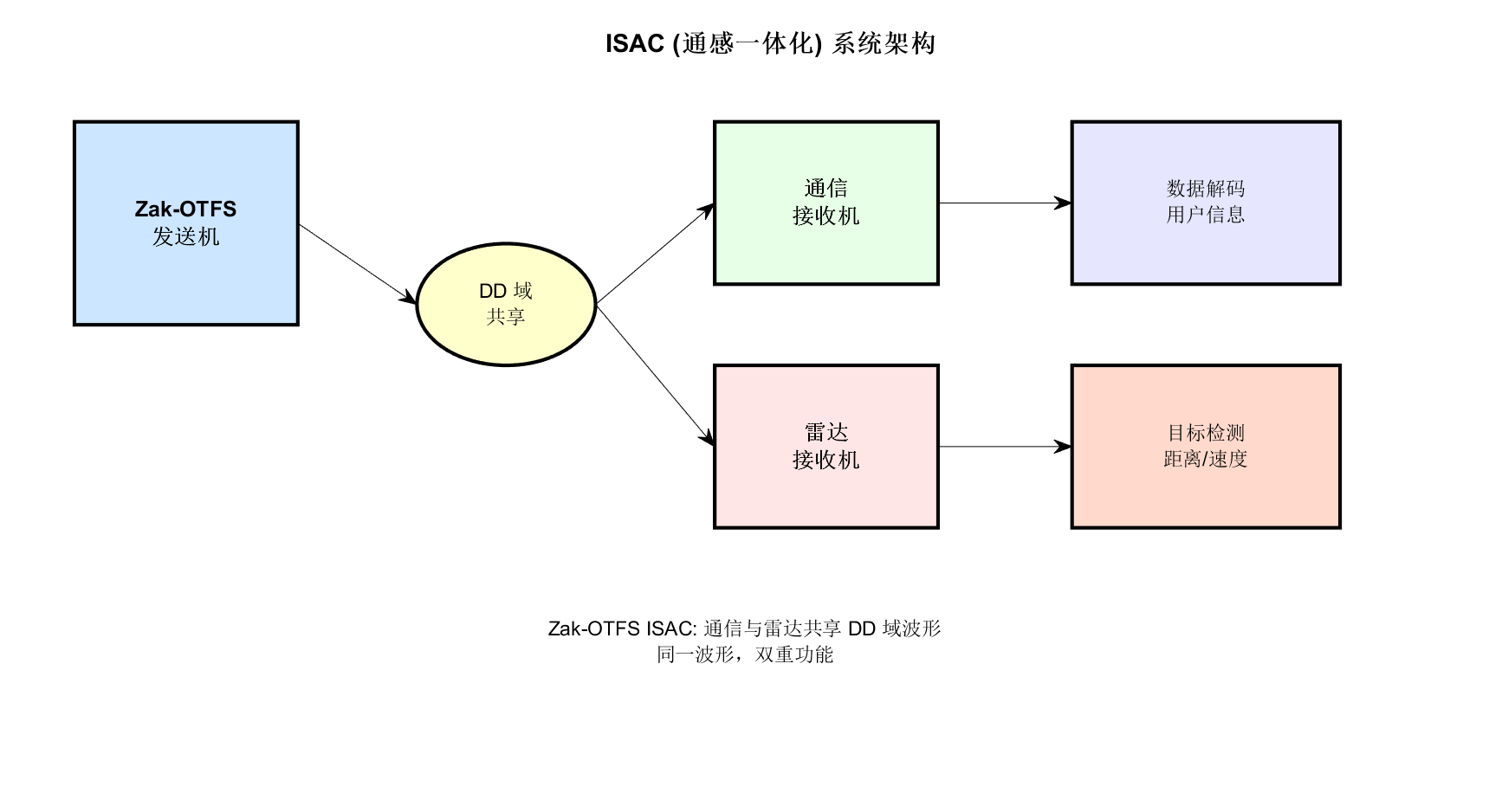
| ? 感知能力弱 | ✅ ISAC 天然融合:DD 域直接对应距离/速度,内置目标检测模块 |
? 核心价值
? 学术研究价值
- 前沿理论:完整实现 Zak 变换理论 (Lampel et al., 2022) 及 Crystallization Condition
- 深度分析:Twisted Convolution 推导、Berry 相位几何解释、CRLB 界分析
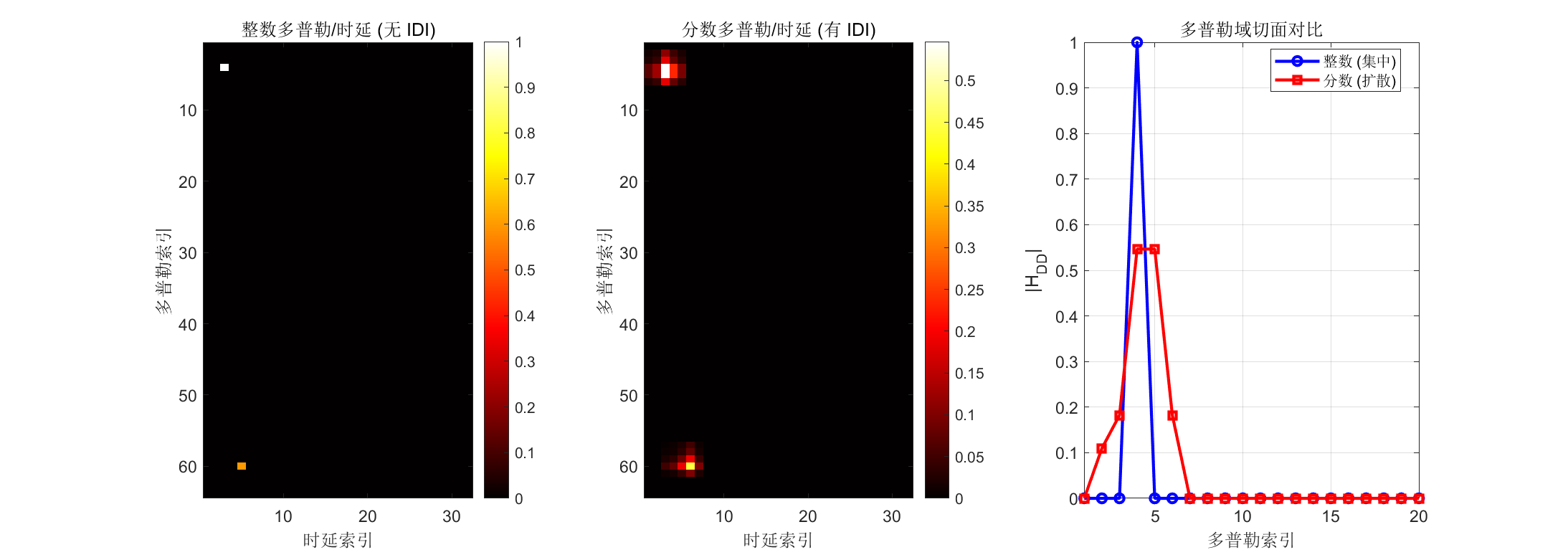
- 分数多普勒:完整的 IDI (Inter-Doppler Interference) 建模与可视化
- 数学严谨:代码与《算法文档》LaTeX 公式一一对应
? 工程应用价值
- 多场景支持:HSR (高铁)、LEO (卫星)、V2X (车联网) 预置信道
- 模块化架构:Modulator/Channel/Detector 完全解耦
- 即插即用:标准化 API 接口,快速集成到链路级仿真
- 全中文注释:适合团队协作与二次开发
⚡ 技术亮点
? Zak-OTFS vs Standard OTFS
| 特性 | Standard OTFS | Zak-OTFS (本平台) |
| -------------------- | -------------------------------- | ------------------------------------- |
| 变换基 | SFFT/ISFFT (2D) | DZT/IDZT (1D) |
| 信道形式 | Twisted Convolution (稀疏带状) | 对角乘法(Crystallization) |
| 均衡器 | LMMSE/MP (复杂) | 单抽头 ZF(简单) |
| 理论基础 | 信号处理 | Heisenberg-Weyl 群论 |
| 复杂度 | O(MN log MN) | O(MN) |
? 性能指标 (实测数据)
基于 demo\ step4\ber\_comparison.m 实测结果
| 场景 | 速度 | OFDM BER | Zak-OTFS BER | 结论 |
| ---------- | ---------- | ------------------ | ------------------------ | -------------------------- |
| 高铁 HSR | 350 km/h | \~3.5e-2 (Floor) | < 1e-5 | ? 打破误码墙 |
| 极端移动 | 500 km/h | \~5e-2 (Floor) | < 1e-4 | ? 极限场景支持 |
| 低速 V2X | 50 km/h | \~1e-3 | < 1e-6 | ✅ 全场景覆盖 |
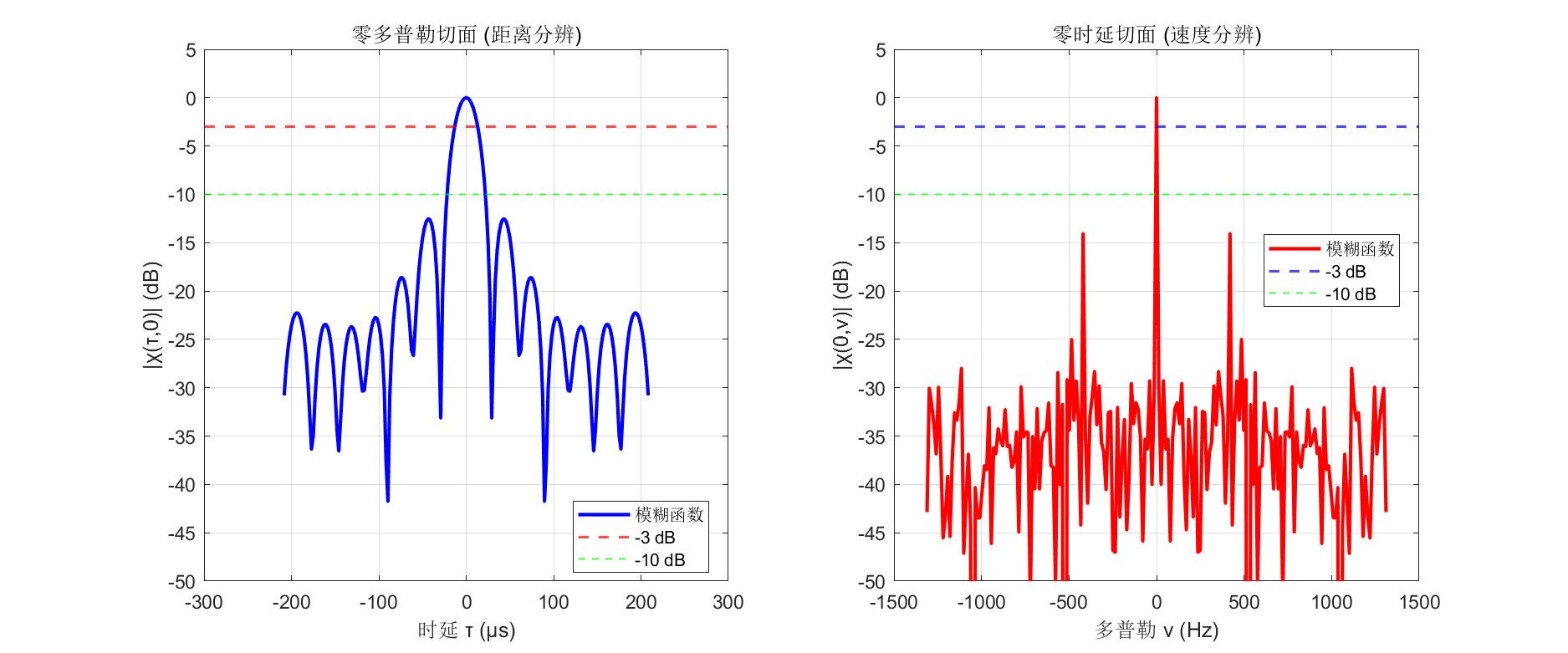
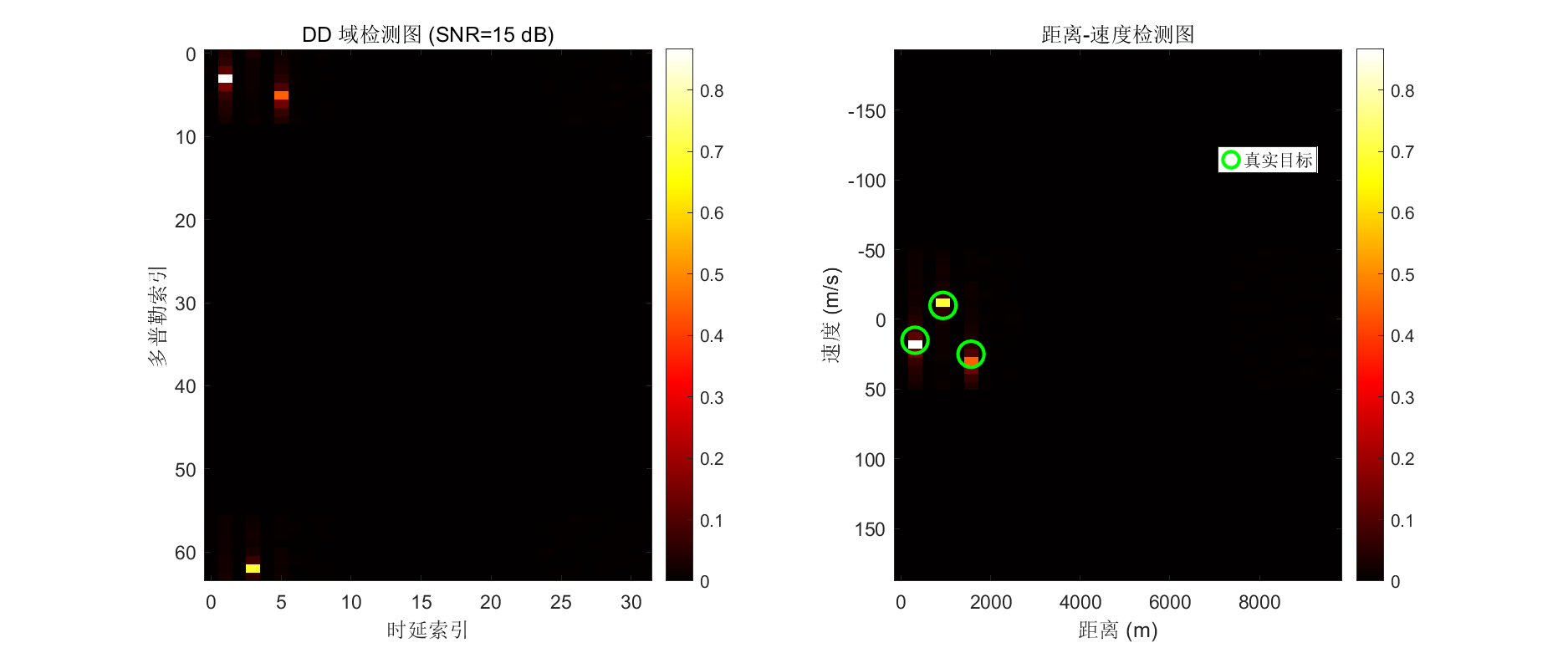
? ISAC 感知性能
| 参数 | 配置值 | 性能 |
| ------------ | ----------------- | -------------------------- |
| 距离分辨率 | M=64, Δf=15kHz | 312.5 m |
| 速度分辨率 | N=32, T=66.7μs | ±11.9 m/s |
| 目标检测 | CFAR | 3 目标同时检测 |
?️ 运行环境
- MATLAB 版本: R2023b 或 R2024b (推荐)
- 依赖工具箱:
- Signal Processing Toolbox (必须)
- Communications Toolbox (推荐)
? 项目结构
Zak-OTFS/ ├── src/ # 核心源代码 │ ├── core/ # DZT/IDZT 变换 │ ├── modulator/ # Zak-OTFS/OFDM 调制器 │ ├── demodulator/ # Zak-OTFS/OFDM 解调器 │ ├── channel/ # 多域信道模型 │ ├── estimation/ # 嵌入式导频估计 │ ├── receiver/ # LMMSE/MP 检测器 │ ├── isac/ # 通感一体化模块 │ └── utils/ # 工具函数 ├── demos/ # 8 个演示脚本 │ ├── demo_step1_modulation.m # 调制原理可视化 │ ├── demo_step2_channel.m # DD 域信道稀疏性 │ ├── demo_step3_estimation.m # 信道估计性能 │ ├── demo_step4_ber_comparison.m # Zak-OTFS vs OFDM │ ├── demo_step5_isac.m # 通感一体化演示 │ ├── demo_step6_fractional.m # 分数多普勒 IDI │ ├── demo_step7_zak_vs_standard.m # Zak vs Standard OTFS │ └── demo_summary.m # 综合演示 └── docs/ # 文档 ├── 算法文档.md # 理论推导 ├── 代码文档.md # API 参考 └── images/ # 演示图片
? 文档体系
本平台提供 "算法 + 代码" 双轨制文档:
? 算法文档
Heisenberg-Weyl 群论基础、Twisted Convolution 严谨推导、Crystallization 条件证明、CRLB 界分析
? 代码文档
完整 API 字典、输入输出维度说明、快速入门示例
? 核心代码展示
? 离散 Zak 变换 (
src/core/dzt.m)
function Z = dzt(x, M, N)
% DZT 离散 Zak 变换
%
% 数学定义:
% Z[k,l] = (1/√M) * Σ_{m=0}^{M-1} x[l+mN] * exp(-j2π*mk/M)
%
% 物理意义: 将时域信号映射到 Delay-Doppler 域
% - k: 多普勒索引 (0 to M-1)
% - l: 时延索引 (0 to N-1)
% 重塑为 N x M 矩阵 (多相分解)
x_matrix = reshape(x, N, M);
% 沿多普勒维做 FFT
Z = fft(x_matrix, M, 2).' / sqrt(M);
end
? 结晶化信道 (
src/channel/apply_zak_channel_crystallized.m)
function Y = apply_zak_channel_crystallized(X, scenario, params) % APPLY_ZAK_CHANNEL_CRYSTALLIZED Zak 域对角化信道 % % 原理: 当满足 Crystallization Condition 时: % τ_max < T, ν_max < Δf % Zak 域信道简化为逐点乘法: Y[k,l] = H[k,l] * X[k,l] % % 优势: 复杂度从 O((MN)^2) 降至 O(MN) % 构建对角信道响应 H_zak = zeros(M, N); for p = 1:num_paths phase = exp(-j*2*pi*(k*l_tau/N - l*k_nu/M + l_tau*k_nu/(M*N))); H_zak = H_zak + h_p * phase; end % 逐点乘法 (对角信道!) Y = H_zak .* X; end
? LMMSE 均衡器 (
src/receiver/lmmse_equalizer.m)
function X_est = lmmse_equalizer(Y, H, noise_var) % LMMSE_EQUALIZER 线性最小均方误差均衡 % % 公式: X_hat = H* / (|H|^2 + σ²) * Y % % 对于 Zak-OTFS 对角信道, 这是逐点操作! X_est = conj(H) .* Y ./ (abs(H).^2 + noise_var); end
? 一键运行
>> addpath(genpath('src'));
>> cd demos
% 旗舰演示: Zak-OTFS vs OFDM 完整对比
>> demo_step4_ber_comparison
% 通感一体化演示: 多目标检测
>> demo_step5_isac
% 综合演示: 一次运行全部核心功能
>> demo_summary
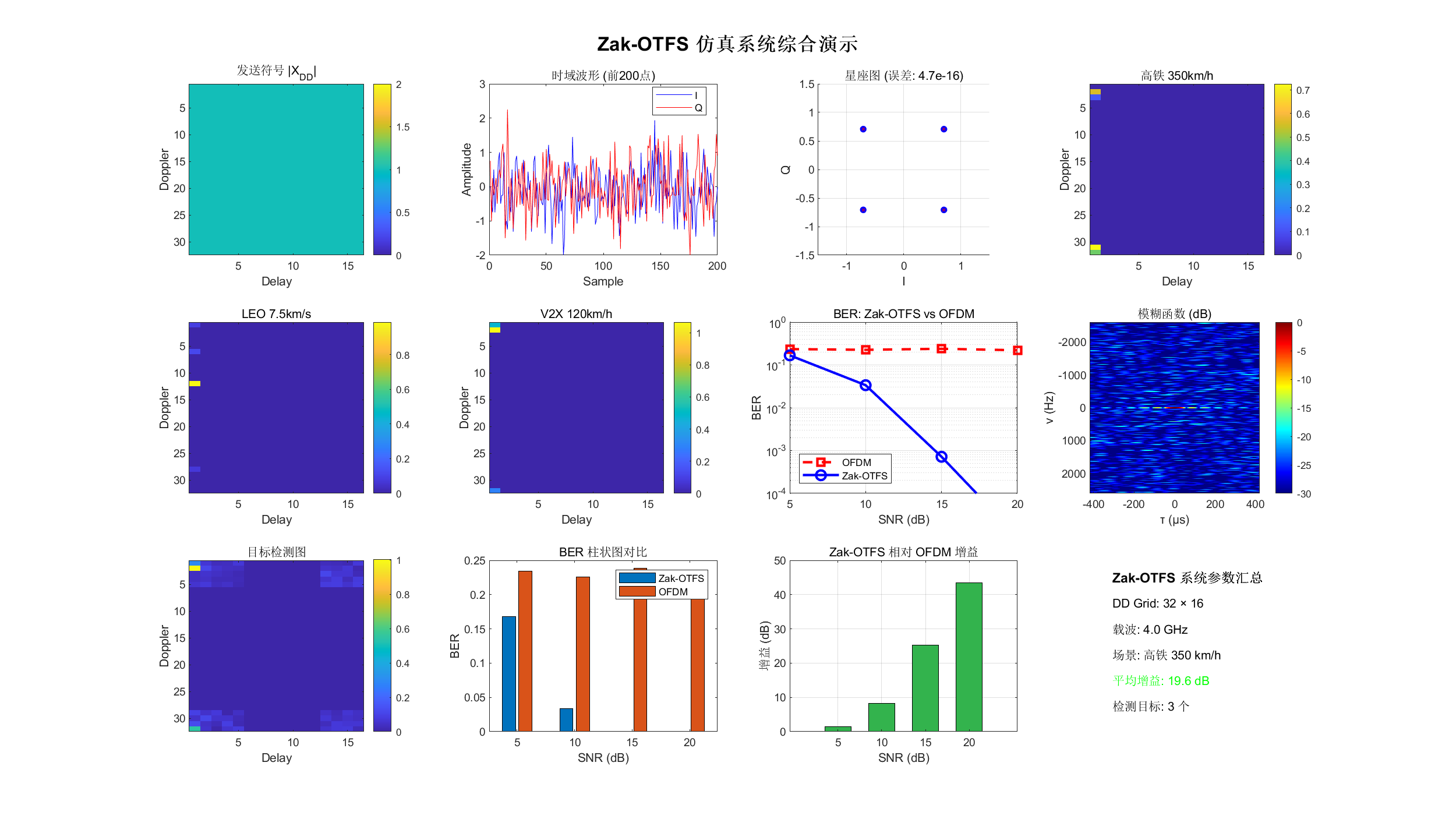
结果预览: 500km/h 极限挑战
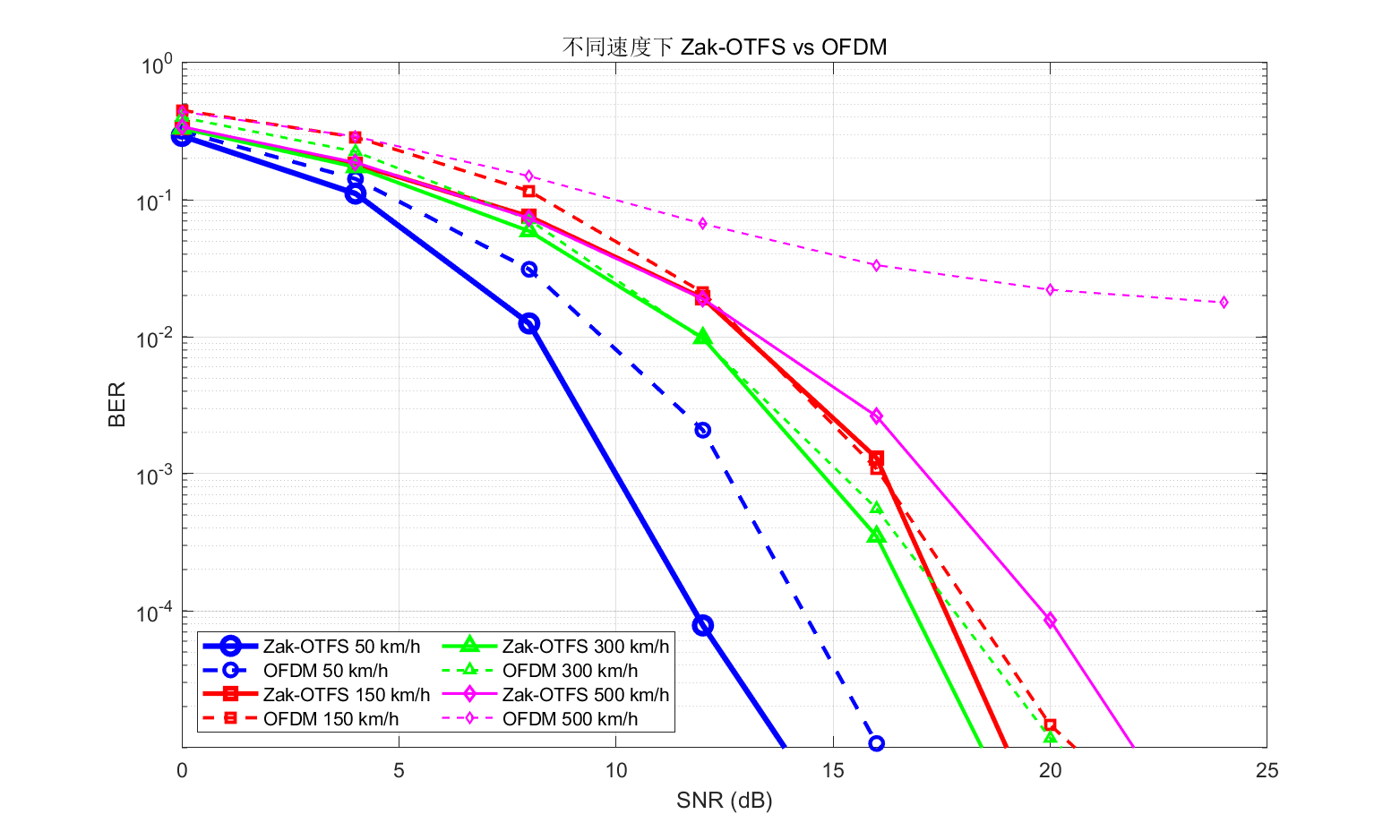
图:Zak-OTFS 各速度曲线几乎重合,证明对多普勒不敏感;OFDM 高速时存在明显误码地板
? 演示图片预览
? 获取方式
本文代码仅为核心片段,完整版工程已整理好。 关注公众号 【 3GPP仿真实验室】进行获取。
? 参考文献
[1] R. Hadani et al., "Orthogonal time frequency space modulation," IEEE WCNC, 2017. (OTFS 开山论文)
[2] F. Lampel, A. Fish, and R. Hadani, "On OTFS using the discrete Zak transform," IEEE Trans. Wireless Commun., 2022. (Zak-OTFS 理论基础)
[3] S. K. Mohammed, "OTFS — A mathematical foundation," arXiv:2302.08696, 2023. (数学严谨推导)
[4] P. Raviteja et al., "Interference cancellation and iterative detection for OTFS," IEEE Trans. Wireless Commun., 2018. (MP 检测器)
[5] Z. Wei et al., "Orthogonal time-frequency space modulation: A promising next-generation waveform," IEEE Wireless Commun., 2021. (综述)
[6] P. Raviteja et al., "Embedded pilot-aided channel estimation for OTFS," IEEE Trans. Veh. Technol., 2019. (信道估计)
[7] W. Yi et al., "Integrated sensing and communication with OTFS," IEEE Open J. Commun. Soc., 2023. (ISAC 应用)
[8] A. J. E. M. Janssen, "The Zak transform: a signal transform for sampled time-continuous signals," Philips J. Res., 1988. (Zak 变换数学理论)