第二章 实验平台硬件资源详解
本章,我们将节将向大家详细介绍正点原子DMG474电机开发板各部分的硬件原理图,让大家对该开发板的各部分硬件原理有个深入理解,并向大家介绍开发板的使用注意事项,为后面的学习做好准备。
本章将分为如下两节:
2.1,开发板原理图详解;
2.2,开发板使用注意事项;
2.1 电机开发板原理图详解
2.1.1 MCU
正点原子DMG474电机开发板选择的是STM32G474VET6作为MCU,该芯片是STM32G474里面配置非常强大的了,它拥有的资源包括:集成FPU和DSP指令,并具有128KB SRAM、512KB FLASH、11个16位定时器、2个32位定时器、2个DMA控制器(共16个通道)、4个SPI、2个全双工I2S、4个IIC、6个串口、1个USB(支持SLAVE)、3个FDCAN、5个12位ADC、4个12位DAC、1个RTC(带日历功能)、1个FSMC接口、一个硬件随机数生成器、以及82个通用IO口等,该芯片的配置十分强悍,很多功能相对STM32F1来说进行了重大改进。
MCU部分的原理图如图2.1.1.1-1~2.1.1.1-3(由于MCU引脚比较多,因此我们把原理图分成3分,方便查看,如果看不清,可以打开A盘à2,电机开发板原理图 文件夹里的原理图进行查看)所示:
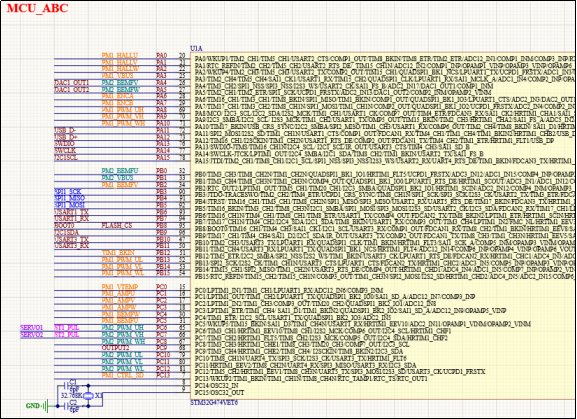
图2.1.1.1-1 MCU部分原理图(A)
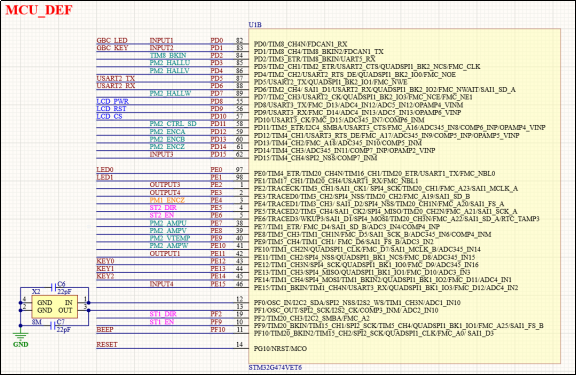
图2.1.1.1-2 MCU部分原理图(B)
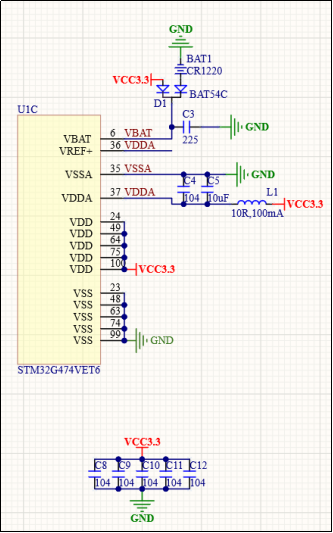
图2.1.1.1-3 MCU部分原理图(C)
图中U1为我们的主芯片:STM32G474VET6(原理图将其分成A/B/C三部分),可以看到,不同的接口,我们以不同的颜色予以区分(和IO分配表同步,电源用红色标识,GND用绿色标识),方便用户快速查找。
这里主要讲解以下2个地方:
1, 后备区域供电脚VBAT脚的供电采用CR1220纽扣电池和VCC3.3混合供电的方式,在有外部电源(VCC3.3)的时候,CR1220不给VBAT供电,当外部电源断开时则由CR1220给其供电。这样,VBAT总是有电的,以保证RTC的走时以及后备寄存器的内容不丢失。
2, 图2.1.1.1-3中的VREF+是参考电压选择端口。我们开发板默认已经接了VDDA,即3.3V作为参考电压。
2.1.2 LCD接口和HMI串口屏接口
正点原子DMG474电机开发板板载的LCD接口和HMI串口屏接口电路如图2.1.2.1所示:
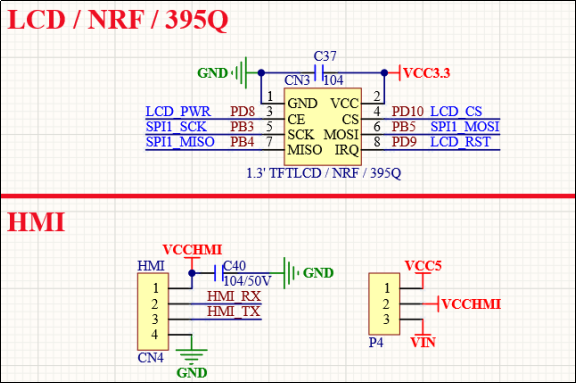
图2.1.2.1 LCD接口和HMI串口屏接口
图中TFT_LCD是一个通用的液晶模块接口,接口为2*4P的2.54间距排母,支持正点原子1.3寸TFTLCD模块。LCD接口连接在STM32G474VET6的SPI1上面,IO占用少且易用,同时该接口也支持正点原子其它的SPI驱动模块,比如:NRF无线通信模块、395Q网络通信模块等。
因为ATK-DMG474电机开发板定位工业应用,所以预留了串口屏,接口为4P的XH2.54端子,只需一组串口PD5(USART2_TX),PD6(USART2_RX)即可实现通信,此接口兼容市面上大部分串口屏。另外,在工业环境中部分触摸屏是RS232接口的,这一类屏幕可使用我们开发板的RS232串口。
需要注意的是,使用HMI串口屏功能时,要将P6处的跳线帽的PD5连接至HMI_TX,PD6连接至HMI_RX。
2.1.3 EEPROM
正点原子DMG474电机开发板板载的EEPROM电路如图2.1.3.1所示:
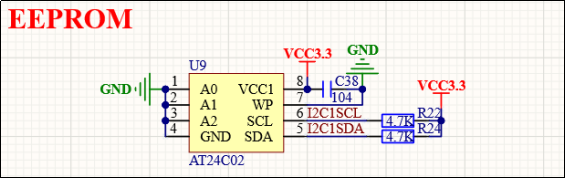
图2.3.1.1 EEPROM
EEPROM芯片我们使用的是24C02,该芯片的容量为2Kb,也就是256个字节,对于我们普通应用来说是足够了的。当然,你也可以选择换大容量的芯片,因为我们的电路在原理上是兼容24C02~24C512全系列EEPROM芯片的。
这里我们把A0~A2均接地,对24C02来说也就是把地址位设置成了0了,写程序的时候要注意这点。I2C1_SCL接在MCU的PA15上,I2C1_SDA接在MCU的PB9上,这里我们虽然接到了STM32的硬件IIC上,但是我们并不提倡使用硬件IIC,因为STM32的IIC是鸡肋!请谨慎使用。
2.1.4 SPI FLASH
正点原子DMG474电机开发板板载的SPI FLASH电路如图2.1.4.1所示:
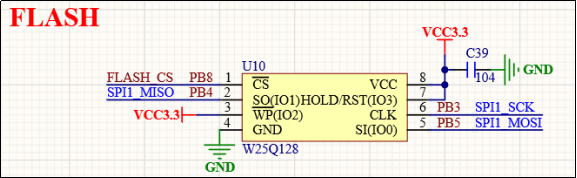
图2.1.4.1 SPI FLASH
SPI FLASH芯片型号为25Q128(可选品牌为:诺存、华邦、博雅等都可以),该芯片的容量为128Mb,也就是16M字节。
图中FLASH_CS连接在MCU的PB8上,SPI1_SCK/SPI1_MOSI/SPI1_MISO则分别连接在MCU的PB3/PB4/PB5上。
需要注意的是,LCD和SPI_FLASH是共用一个SPI的,所以不可同时操作这两个外设时,需通过片选信号选择控制器件。
2.1.5 LED
正点原子DMG474电机开发板板载了3个LED,其原理图如图2.1.5.1所示:
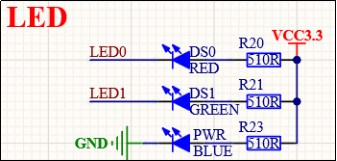
图2.1.5.1 LED
其中PWR是系统电源指示灯,为蓝色。LED0(DS0)和LED1(DS1)分别接在PE0和PE1上。为了方便大家判断,我们选择了DS0为红色的LED,DS1为绿色的LED。
2.1.6 按键
正点原子DMG474电机开发板板载了3个输入按键,其原理图如图2.1.6.1所示:
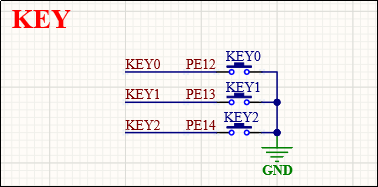
图2.1.6.1 输入按键
KEY0、KEY1和KEY2用作普通按键输入,分别连接在PE12、PE13和PE14上,这里并没有使用外部上拉电阻,但是STM32的IO作为输入的时候,可以设置上下拉电阻,所以我们使用STM32的内部上拉电阻来为按键提供上拉。
2.1.7 RS232串口
正点原子DMG474电机开发板板载了RS232(母头)接口,其电路如图2.1.7.1所示:
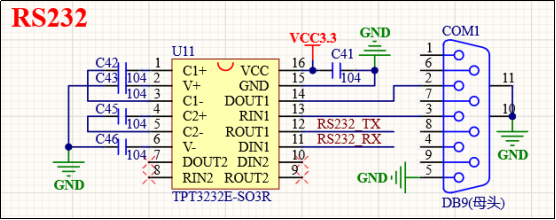
图2.1.7.1 RS232接口
可以看到RS232接口COM1,使用的是DB9母头。因为RS232电平不能直接连接到STM32,所以需要一个电平转换芯片。这里我们选择的是TPT3232E(也可以用SP3232)来做电平转接,图中RS232_TX/RS232_RX可通过P6处的跳线帽连接至MCU的PD6(USART2_RX)和PD5(USART2_TX)上。
2.1.8 RS485接口
正点原子DMG474电机开发板板载的RS485接口电路如图2.1.8.1所示:
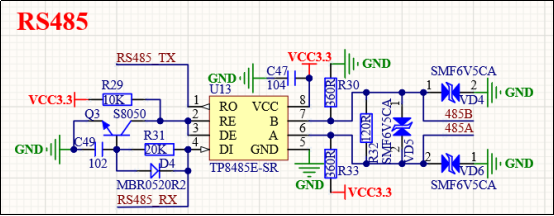
图2.1.8.1 RS485接口
RS485电平也不能直接连接到STM32,同样需要电平转换芯片。这里我们使用TP8485来做485电平转换,其中R32为终端匹配电阻,而R30(下拉),R33(上拉),则是两个偏置电阻,以保证静默状态(A-H ; B-L)时,485总线表现逻辑1,另外在总线上以及总线之间分别使用了双向TVS管,以保护芯片IO,从而保护芯片。
注意需要将RS485_RX/RS485_TX通过P5的跳线帽选择连接到MCU的PB10(USART3_TX)和PB11(USART3_RX)上面。可以看到我们没有用到单独的收发使能控制脚,而是做了一个自动收发电路,其工作原理如下:
可以看到RE和DE接一起的,默认10K上拉,所以默认发送模式(高电平为发送模式,低电平为接收模式),RS485_RX(连接USART3_TX)通过芯片DI脚发送数据,发送0数据的时候,自动收发电路不动作,所以驱动输出A=L,B=H,总线表现逻辑0;当发送1数据的时候,因为R31和C49组成的RC电路,当发送速率很高的时候,NPN三极管Q3来不及导通,RE和DE仍为高电平,驱动输出A=H,B=L,总线表现逻辑1;当发送速率比较低的时候,NPN三极管Q3会缓慢导通,RE和DE变为低电平,485芯片进入接收模式,驱动端DI高阻态,但是因为偏置电阻R30(下拉B=0),R33(上拉A=1),所以总线仍然表现逻辑1。而肖特基二极管MBR0520用于加速Q3关断,保证DI由高变低时,芯片可以快速进入发送模式。
当我们需要进行接收时,只需要拉高RS485,RE和DE变为低电平,数据(RO)通过RS485_TX(连接USART3_RX)传输给MCU。
2.1.9 CAN接口
正点原子DMG474电机开发板板载的CAN接口电路如图2.1.9.1所示:
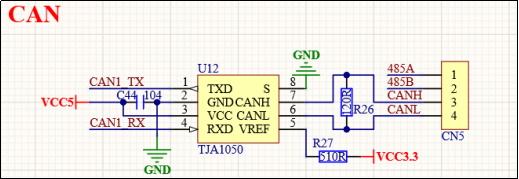
图2.1.9.1 CAN接口
CAN总线电平也不能直接连接到STM32,同样需要电平转换芯片。这里我们使用TJA1050来做CAN电平转换,其中R26为终端匹配电阻。CAN_TX和CAN_RX通过P2处的跳线帽选择连接在MCU的PA12(CAN1_TX)和PA11(CAN1_RX)上面。
另外可以看到,CAN和RS485共用一个端子4P HT396R端子CN5。
2.1.10 有源蜂鸣器
正点原子DMG474电机开发板板载的有源蜂鸣器电路如图2.1.10.1所示:
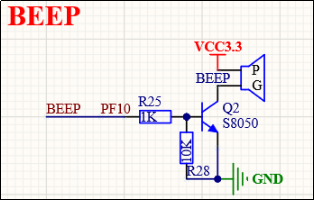
图2.1.10.1 有源蜂鸣器
有源蜂鸣器是指自带了震荡电路的蜂鸣器,这种蜂鸣器一接上电就会自己震荡发声。而如果是无源蜂鸣器,则需要外加一定频率(2~5Khz)的驱动信号,才会发声。这里我们选择使用有源蜂鸣器,方便大家使用。
图中Q2是用来扩流,R28则是一个下拉电阻,避免MCU复位的时候,蜂鸣器可能发声的现象。BEEP信号直接连接在MCU的PF10上面。
2.1.11 2路隔离步进电机驱动器接口
正点原子DMG474电机开发板板载了2路隔离型步进电机驱动器接口,其电路如图2.1.11.1所示:
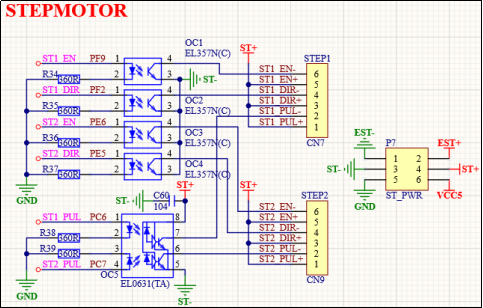
图2.1.11.1 2路步进电机驱动器接口
图中,2路(STEP1~2)步进电机驱动器接口(CN9、CN7)完全独立,互不影响,接口采用6P的HT396R端子,接口线序和正点原子步进电机驱动器(ATK-2MD5050)接口相同,可通过一根6P线连接。
其中EN使能信号和DIR方向信号使用通用光耦EL357N隔离,PUL脉冲信号则使用双路高速光耦EL0631隔离。我们电机开发板虽然只留出2路步进电机驱动器接口,并不是说开发板只能驱动2路步进电机,如果你了解了步进电机控制原理,我们电机开发板完全可以控制8路甚至12路步进电机。另外,因为步进电机驱动器接口可以兼容伺服电机驱动接口,所以这些接口可以用来驱动伺服电机。
可以看到驱动器信号供电为ST+和ST-,开发板预留了供电选择接口(P7),可使用板载5V(VCC5)电源或者外接电源EST+,EST-(≤7V,因为EL0631供电电压不能超过7V),默认使用板载5V电源。
需要注意的是,MCU使用NPN方式驱动光耦(EL357和EL0631),所以步进驱动器接口信号,我们采用共阳模式,即PUL+ 、EN+、DIR+接到电源ST+,对应的PUL- 、EN-、DIR-信号就接到光耦的输出引脚。
2路步进驱动器用到IO有ST1_EN(PF9)、ST1_DIR(PF2)、ST1_PUL(PC6);ST2_EN(PE6)、ST2_DIR(PE5)、ST2_PUL(PC7);另外ST1_PUL、ST2_PUL和2路舵机控制信号以及直流有/无刷驱动接口2的2相上桥驱动PWM信号共用PC6、PC7,在上面的IO资源分配表里也有说到,所以大家注意分开使用。
2.1.12 2路舵机接口
正点原子DMG474电机开发板板载了2路舵机接口,电路如图2.1.12.1所示:
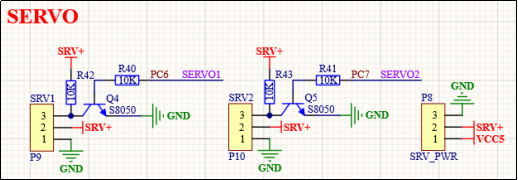
图2.1.12.1 2路舵机接口
图中可以看到总共2路舵机接口(SRV1~2),接口采用1*3P的2.54排针,可以直连舵机。
其中,SRV+和GND为舵机电源,有2种供电方式,可以通过P8跳线帽接口选择,跳线帽短接SRV+和VCC5,则使用板载5V供电;断开跳线帽,在SRV+和GND上外接电源则使用外部电源。用户可根据舵机供电参数选择供电方式。大功率舵机舵机建议使用外接电源的方式。
舵机控制信号SERVO1~2并不是直接控制舵机,而是经过电平转换来控制舵机,这样既隔离了IO,又可以控制各种不同电平的舵机。电平转换电路实际就是一个反向器,因为是反向器,所以控制电平需要反过来,比如要给舵机一个2ms高电平,周期20ms的信号,控制信号实际需要输出2ms低电平+18ms高电平。
控制信号SERVO1~2分别连接在MCU的PC6、PC7(TIM8_CH1~2)上,需要注意的是,步进电机驱动器1~2的脉冲信号PUL以及直流有/无刷电机驱动2的2相上桥PWM都使用到PC6、PC7,在上面的IO资源分配表里也有说到,所以大家注意分开使用。
2.1.13 2路直流有/无刷电机驱动器接口
正点原子DMG474电机开发板板载了2路直流有/无刷电机驱动器接口,电路如图2.1.13.1所示:
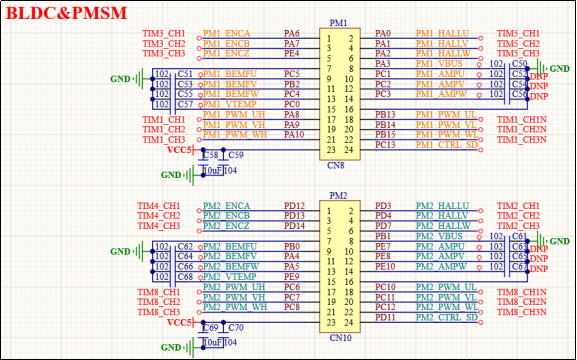
图2.1.13.1 2路直流有/无刷电机驱动器接口
可以看到图中包含2路(PM1,PM2)全功能型直流无刷电机驱动器接口(CN8,CN10),接口为2*12P的2.54间距直脚牛角座,可通过一根24P专用排线和正点原子的直流无刷驱动板(ATK-PD6010B)以及直流有刷驱动板(ATK-PD6010D)直连。ADC采集引脚上接了102电容,这个是用来滤除信号上的高频杂波,保证采集的信号更准确。
接口每一路包含3路互补定时器(6路PWM)信号、3相霍尔传器信号、3相编码器信号、3路电流信号、3路反向电动势信号、驱动器电压采集信号、及温度信号以及停机信号。从MCU外设的角度来说,每一路需要用到3~4组定时器,8路ADC以及一个通用IO,那么2路就需要6~7组定时器,16路ADC。经过我们对IO完全充分的分配,做到了7组定时器和16路ADC完全独立,互不干扰,所以我们可以同时使用2路直流无刷驱动板。
如果连接直流驱动板,则只需要用到3相编码器信号、3路ADC、1路互补定时器信号以及停机信号。因为使用的资源少了,所以如果使用单独接线的方式,至少可以接4路直流有刷驱动板。
我们知道,永磁同步电机是包含编码器和霍尔传感器的,如果IO分配不恰当,定时器没分配好,这个驱动器接口就只能留出霍尔传感器接口,或者编码器接口,那用户在使用永磁同步电机的时候就只能选一个接口使用了,要么编码器要么霍尔传感器。这也就是我们做全功能驱动器接口的原因。另外,我们知道ST的FOC,对定时器和ADC是有特殊要求的,如果没分配好,驱动板是没法跑ST的FOC的,正点原子DMG474电机开发板不但支持ST的FOC,而且支持2路同时跑ST的FOC。
2路直流驱动器接口占用的IO以及外设如表2.1.13.2所示:

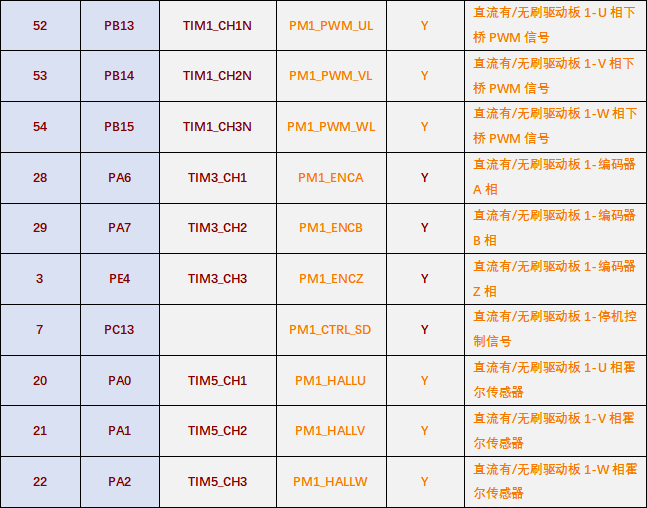
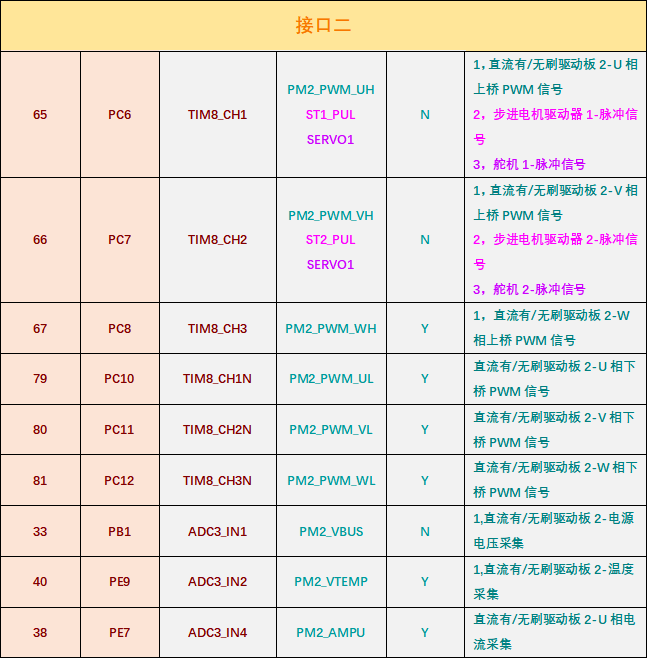
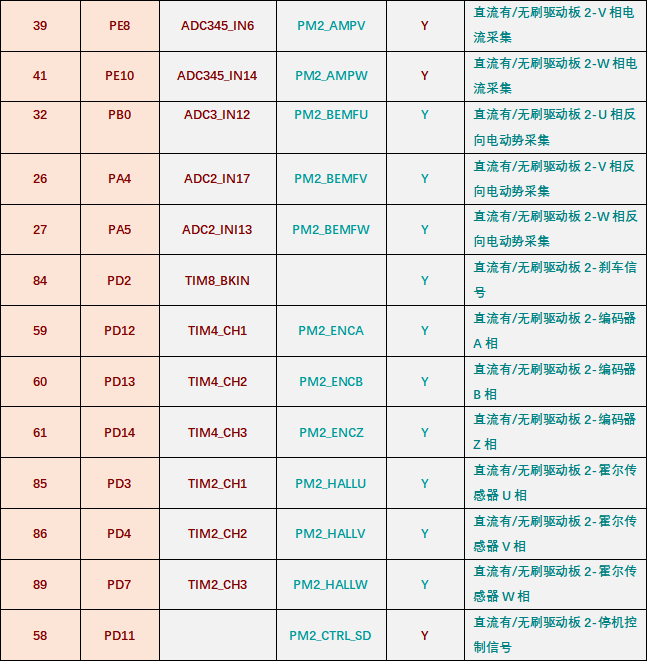
表2.1.13.2:直流有/无刷电机驱动器接口IO分配
2.1.14 刹车输入和步进电机驱动器信号外接电源接口
正点原子DMG474电机开发板板载的PWM刹车输入和步进电机驱动器信号外接电源接口接口,电路如图2.1.14.1所示:
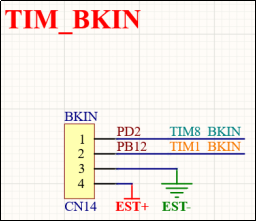
图2.1.14.1 刹车输入和步进电机驱动器信号外接电源接口
接口为4P HT396R端子,包含了2个高级定时器的刹车输入引脚TIM1_BKIN(PB12) TIM8_BKIN(PD2)和步进电机驱动器信号外接电源(EST+ EST-)。因为这个外接电源可选给高速光耦EL0631(最高电压7V)供电,所以EST+和EST-这组外接电源不能超过7V。
2.1.15 编码器接口
正点原子DMG474电机开发板板载的编码器接口,电路如图2.1.15.1所示:
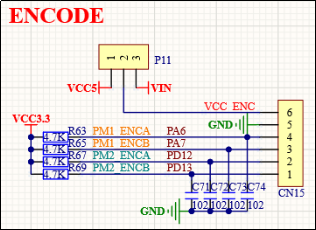
图2.1.15.1 编码器接口
图中CN15接口为6P HT396R端子。接口上包含2路包含A,B相的编码器接口以及编码器供电接口。这2路编码器接口正是直流有/无刷电机驱动板接口上的编码器接口,它们是连一起的。因为正点原子的直流无刷驱动板(ATK-PD6010B)和直流有刷驱动板(ATK-PD6010D)已经板载了编码器接口,无需再单独接线到开发板,但如果使用其他不带编码器接口的驱动板,那开发板预留的这个编码器接口就可以派上用场了。
还可以看到编码器供电有2种方式,通过跳线帽P11选择,可以使用板载5V或者电源输入VIN,默认使用板载5V。
信号默认经过4.7K上拉到3.3V,同时102电容对地,目的是让输入的编码器信号更稳定。
2.1.16 6路模拟量采集接口
正点原子DMG474电机开发板板载了6路模拟量采集接口,其原理图如图2.1.16.1所示:
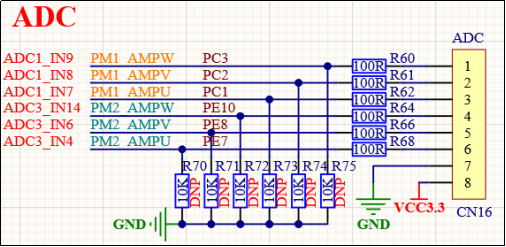
图2.1.16.1 6路模拟量采集接口
图中CN16接口为8P HT396R端子。接口上包含6路模拟采集脚以及一组3.3V供电接口。可以看到,6路ADC采集口和直流有/无刷驱动器接口的电流采集信号以及反向电动势采集信号共用,所以不能同时使用。
注意:接口信号通过100R电阻直接接到MCU的ADC,所以接口信号不能超过3.3V。
2.1.17 4路通用隔离输入接口
正点原子DMG474电机开发板板载了2x2路通用隔离输入接口,原理图如图2.1.17.1所示:
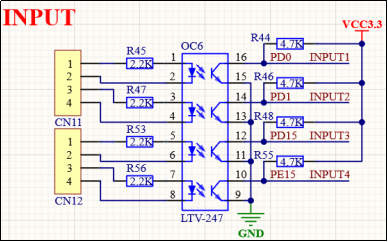
图2.1.17.1 隔离输入接口
可以看到总共2组(每组2路)通用隔离输入接口,每一组接口都使用一个4P HT396R端子。使用了3个4路通用型光耦LTV-247。光耦输入端子全部引出,方便用户使用不同的接法,串接了2.2K电阻可保证检测24V以内的开关信号,比如接近传感器,限位开关传感器等。光耦的输入端则连接到MCU的IO上,并使用4.7K电阻上拉(默认高电平),当输入信号有效时,变为低电平。
输入信号和MCU的IO对应关系是:INPUT1->PD0、INPUT2->PD1、INPUT3->PD15、INPUT4->PE15。
注意:开发板明确标明了输入信号正负极,不能反接。
2.1.18 4路通用隔离输出接口
正点原子DMG474电机开发板板载了4路通用隔离输出接口,原理图如图2.1.18.1所示:
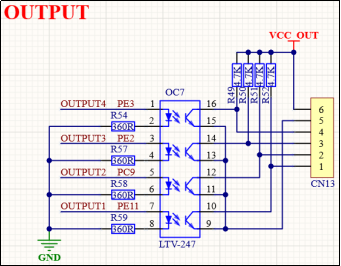
图2.1.18.1 隔离输出接口
图中CN13为6P HT396R端子,使用1个4路通用光耦LTV-247,光耦输入采用共阴极接法,限流电阻360R,光耦输入正极接MCU,推挽输出高电平可以让光耦导通。光耦输出也是共阴极接法,电压由外部提供(≤24V),默认4.7K上拉。当光耦输入高电平时,输出低电平。
输出信号和MCU的IO对应关系是:OUTPUT1->PE11、OUTPUT2>PC9、OUTPUT3->PE2、OUTPUT4->PE3。
注意:开发板明确标明了外接电源正负,不能反接。
2.1.19 ATK模块接口
正点原子DMG474电机开发板板载了,其原理图如图2.1.19.1所示:
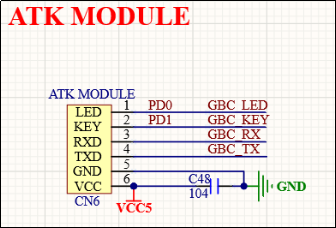
图2.1.19.1 ATK模块接口
如图所示,CN6是一个1*6P的2.54排座,可以用来连接正点原子推出的一些模块,比如:蓝牙串口模块、GPS模块、MPU6050模块等。有了这个接口,我们连接模块就非常简单,插上即可工作。
信号和MCU的连接关系是:GBC_LED->PD0、GBC_KEY->PD1,其中需要注意的是GBC_RX和GBC_TX需要通过P5的跳线帽连接至MCU的PB10和PB11。
2.1.20 SWD接口
正点原子DMG474电机开发板板载了SWD下载调试接口,其原理图如图2.1.20.1所示:
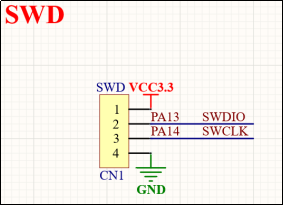
图2.1.20.1 SWD接口
图中CN1为4P XH2.54端子,因为SWD使用方便还节省IO,所以我们使用这种接口来对MCU进行仿真调试。这个接口支持正点原子的DAP仿真器和STLINK仿真器。
2.1.21 电源接口
正点原子DMG474电机开发板板载了1组电源接口,其原理图如图2.1.21.1所示:
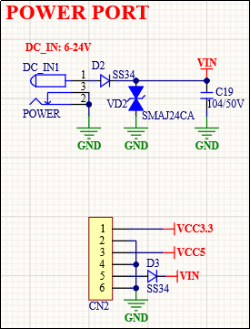
图2.1.21.1 电源接口
可以看到,有2种电源接口,DC-005和6P HT396R。其中电源输入有2种方式,DC_IN和CN2接口5、6脚,供电范围DC6~24V,输入电源分别经过D2和D3肖特基二极管,以起到防反接作用,双向TVS管VD2用于过压保护(24V),C19则是输入电源滤波电容,C19采用104/50V的电解电容,可有效抑制输入电源的尖峰干扰。
为了安全起见,对外输出的电源,电流不要超过1.5A。
2.1.22 电源系统
正点原子DMG474电机开发板板载的电源系统,其原理图如图2.1.22.1所示:
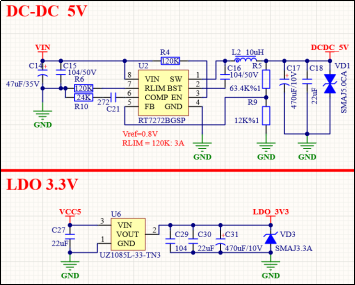
图2.1.22.1 电源系统
图中总共2组电源,5V DCDC和3.3V LDO。其中DCDC芯片U2采用高效大电流同步降压芯片RT7272BGSP(SOP8封装,带散热焊盘),同步降压的方式省掉了大体积的续流二极管,提高转换效率以及降低发热,最大可输出3A电流,为供电系统提供充沛的电力。输入和输出都使用了组合滤波电容的方式,保证了电源更低的纹波,双向TVS VD1则是用于过压保护(5V)。
线性稳压芯片U6采用UZ1085L-33(TO252封装,带散热焊盘)芯片,它将5V转换为3.3V,电流输出可以到2A。线性稳压电源的好处,可进一步降低电源纹波,因为我们电机开发板用了大量的AD采集,所以电源纹波越小越好。输出同样采用了电解电容+陶瓷电容的方式,进一步降低了电源高频干扰和纹波,TVS管VD3同样用于过压保护(3.3V)。
2.1.23 电源保护电路
正点原子DMG474电机开发板板载的电源保护电路,其原理图如图2.1.23.1所示:
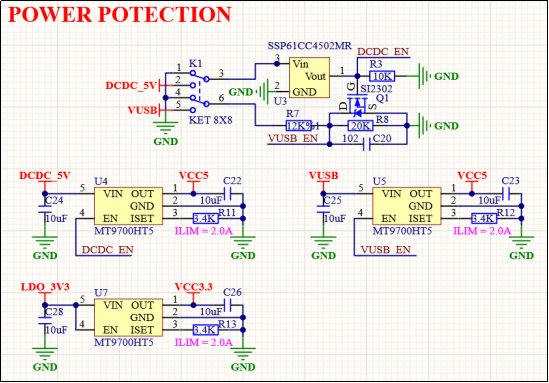
图2.1.23.1 电源保护电路
为了保证电源的安全性,我们设计了电源保护电路,包括电压互锁电路和过流保护电路。
可以看到板载了3路过流保护芯片MT9700HT5(SOT23-5),芯片5脚输入,1脚输出,4脚为使能脚,高电平使能输出,3脚下拉的3.4K限流电阻将芯片保护电流设置为2A。
DCDC_5V接到了U4的输入,并通过DCDC_EN控制输出VCC5(DCDC_EN通过开关按键K1控制)。
VUSB(来自USB_TypeC接口)则接到U5的输入,并通过VUSB_EN控制输出,输出只接到VCC5,所以只能用于给开发板供电。需要注意的是给开发板供电的VCC5,可以来自DCDC_5V也可以来自VUSB。线性电源输出LDO_3V3接到了U7的输入,U7的EN引脚直接接到了VIN,也就是LDO_3V3上电后,VCC3.3也跟着输出。
我们再来看下5V电压互锁电路,目的是选择DCDC_5V和VUSB 5V之间一种进行供电,且DCDC_5V优先级高于VUSB 5V,这样就可以避免DCDC_5V干扰USB,甚至烧坏USB口。
电路原理如下:
双联自锁开关K1分别接入DCDC_5V和VUSB,芯片U3用于电压检测, SSP61CC4502MR表示3脚输入电压高于4.5V,1脚输出高电平,否则输出低电平。该芯片1脚接的DCDC_EN控制U4输出,同时通过NMOS Q1控制了VUSB_EN。
当开关K1断开时,DCDC_EN和VUSB_EN都为低电平,U4、U5均关断,开发板断电;当K1按下闭合后,DCDC_5V连接到U4的输入,因为电压大于4.5V,所以立即输出高电平,DCDC_EN 使能脚输出高,DCDC_EN通过Q1 NMOS将VUSB_EN短接到地,所以开发板只由DCDC_5V供电;当我们拔掉输入电源VIN后,DCDC_5V快速下降到4.5V以下,DCDC_EN输出低电平,Q1 NMOS关断并释放VUSB_EN,这个时候VUSB通过R7、R8分压拉高VUSB_EN,整个板子供电自动切换到USB供电。
2.1.24 USB串口
正点原子DMG474电机开发板板载的USB转串口电路,其原理图如图2.1.24.1所示:
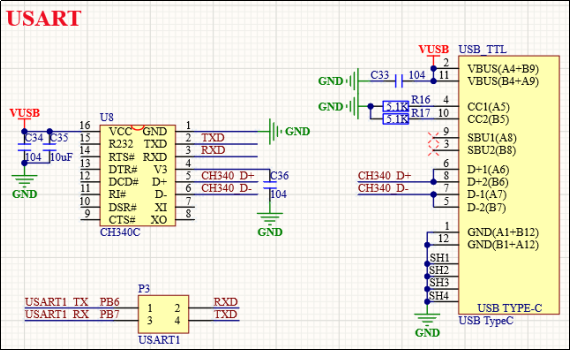
图2.1.24.1 USB串口
图中USB转串口芯片(U8),我们选择的是CH340C,无需外部晶振,是CH340G的升级版本,非常好用。该芯片的供电VUSB来自TypeC座(接电脑USB)。
可以看到,RXD和TXD是通过2*2P 2.54跳线帽P3分别连接到MCU的PB6(USART1_TX)和PB7(USART1_RX),从而实现电脑和MCU的通信。另外,当我们拔掉跳线帽之后,可以将其当作一个USB转串口模块来使用(TypeC口连接电脑即可,并不需要给开发板上电)。
2.1.25 USB从机接口
正点原子DMG474电机开发板板载一组USB主从机接口,其原理图如图2.1.25.1所示:
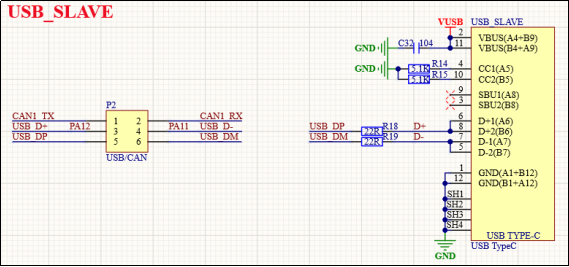
2.1.25.1 USB从机接口
因为主控STM32G474VET6支持USB从机,所以我们板载了从机接口USB_SLAVE(TypeC口)。为了节约IO,我们设计CAN和USB共用PA11和PA12,可通过P2的跳线帽选择对应功能。
USB_SLAVE可以用来连接电脑,实现USB读卡器或USB虚拟串口实验。另外,这个接口还具有供电功能,VUSB可通过限流开关为开发板供电(当主电源VIN没有输入时)。
2.2 电机开发板使用注意事项
为了让大家更好的使用正点原子DMG474电机开发板,我们在这里总结该开发板使用的时候尤其要注意的一些问题,希望大家在使用的时候多多注意,以减少不必要的问题。
1, 开发板的电源输入(VIN)范围是DC6-24V,DCDC 5V和3.3V电源,经过限流(2A)开关给开发板供电,因为DCDC 5V可输出较大电流,所以在给开发板供电的同时,可对外输出,而TypeC座提供5V电源(VUSB),不能输出足够大电流,所以可用于给开发板供电,但不建议对外供电输出(舵机以及驱动板等)。
2, 1个USB供电最多500mA,且由于导线电阻存在,供到开发板的电压,一般都不会有5V,如果使用了很多大负载外设,比如屏幕、舵机模块等,那么可能引起USB供电不够,所以如果是使用屏幕、舵机模块的朋友,或者同时用到多个模块的时候,建议大家使用VIN电源供电。如果没有独立电源,建议可以同时插2个USB口,这样供电可以更足一些。
3, 当你想使用某个IO口用作其他用处的时候,请先看看开发板的原理图或者IO分配表,以检查该IO口是否有连接在开发板的某个外设上,如果有,该外设的这个信号是否会对你的使用造成干扰,先确定无干扰,再使用这个IO。
4, 开发板上有多处跳线帽,有几组跳线帽是用于选择接口供电方式的,大家在上电前务必检查跳线帽是否设置正确,以免烧毁接口;另外还有几组跳线帽是用于选择不同的功能的,可节约IO。比如485/ATK模块接口、USB/CAN、232/HMI等等这些。
5, 当液晶显示白屏的时候,请先检查液晶模块是否插好(拔下来重新插试试),如果还不行,可以联系淘宝技术支持,再做进一步的分析。
至此,本手册的实验平台(正点原子DMG474电机开发板)的硬件部分就介绍完了,了解了整个硬件对我们后面的学习会有很大帮助,有助于理解后面的代码,在编写软件的时候,可以事半功倍,希望大家细读!另外正点原子开发板的其他资料及教程更新,都可以在技术论坛 下载到,大家可以经常去这个论坛获取更新的信息。